Robot Operating System (ROS) offers an open-source platform with modular tools and community support, providing flexibility for developing diverse robotic applications. Proprietary OS typically delivers optimized performance and dedicated support but limits customization and may involve higher costs, impacting your project's adaptability and budget.
Table of Comparison
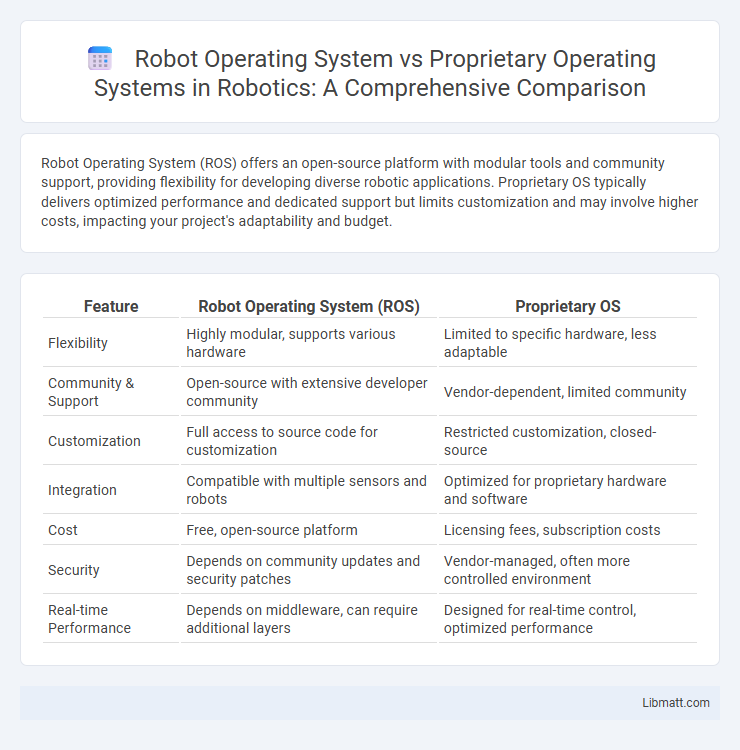
| Feature | Robot Operating System (ROS) | Proprietary OS |
|---|---|---|
| Flexibility | Highly modular, supports various hardware | Limited to specific hardware, less adaptable |
| Community & Support | Open-source with extensive developer community | Vendor-dependent, limited community |
| Customization | Full access to source code for customization | Restricted customization, closed-source |
| Integration | Compatible with multiple sensors and robots | Optimized for proprietary hardware and software |
| Cost | Free, open-source platform | Licensing fees, subscription costs |
| Security | Depends on community updates and security patches | Vendor-managed, often more controlled environment |
| Real-time Performance | Depends on middleware, can require additional layers | Designed for real-time control, optimized performance |
Introduction to Robot Operating Systems
Robot Operating Systems (ROS) provide a flexible framework designed for developing robot software, enabling seamless integration of various hardware and software components. Unlike Proprietary Operating Systems, ROS is open-source, promoting collaboration and rapid innovation within the robotics community. Your choice between ROS and a Proprietary OS will significantly impact customization capabilities, scalability, and access to extensive libraries for sensor integration and control algorithms.
Overview of Proprietary Robot OS
Proprietary Robot Operating Systems (ROS) are developed and maintained by specific companies, offering tailored solutions with optimized performance and dedicated support for their hardware platforms. These closed-source systems provide enhanced security, stability, and integration capabilities, often including specialized tools and middleware designed for particular industrial or commercial robots. Your choice of a proprietary OS may ensure seamless compatibility and vendor-specific features but can limit customization and community-driven innovation compared to open-source alternatives.
Key Features of ROS
Robot Operating System (ROS) offers open-source, modular architecture enabling seamless integration of various sensors, actuators, and algorithms through message-passing interfaces and standardized communication protocols. It supports multi-robot systems, real-time data processing, and extensive libraries for navigation, perception, and manipulation, providing flexible scalability and community-driven enhancements. Your robotic projects benefit from ROS's interoperability and extensive support for hardware abstraction, diagnostics, and tools for simulation and visualization.
Advantages of Proprietary Robot OS
Proprietary Robot Operating Systems offer enhanced security and optimized performance tailored specifically to the hardware, ensuring reliable and consistent operation in critical applications. They provide dedicated support and regular updates directly from the manufacturer, minimizing downtime and facilitating faster troubleshooting. Your robotics projects benefit from seamless integration with specialized components and software, improving overall system efficiency and robustness.
Flexibility and Customization
Robot Operating System (ROS) offers unparalleled flexibility and customization through its open-source architecture, enabling developers to modify and extend functionalities to suit diverse robotic applications. Proprietary operating systems, in contrast, often limit customization due to closed-source restrictions and vendor-specific constraints, which can hinder adaptability and integration with third-party tools. The modular design of ROS facilitates seamless scalability, making it ideal for complex, evolving robotic projects compared to the rigid frameworks of proprietary OS.
Cost Considerations: Open Source vs Proprietary
Open-source Robot Operating System (ROS) significantly reduces upfront costs by eliminating licensing fees associated with proprietary OS platforms. Your development budget benefits from the extensive community support, shared resources, and frequent updates that open-source frameworks provide, minimizing long-term expenses. Proprietary OS solutions often incur higher total cost of ownership due to licensing, vendor support fees, and limited customization options.
Community Support and Resources
Robot Operating System (ROS) benefits from a vast, open-source community providing extensive documentation, tutorials, and shared code libraries, making it easier for developers to troubleshoot and innovate. Proprietary operating systems often offer dedicated customer support and specialized tools but may lack the collaborative resources and rapid updates found in ROS. Depending on Your project's needs, ROS provides greater flexibility and community-driven solutions, while proprietary OS options ensure tailored support and stability.
Security and Reliability
Robot Operating System (ROS) offers open-source transparency that allows continuous security auditing and rapid vulnerability patching, enhancing reliability through community-driven updates and modular design. Proprietary operating systems provide controlled environments with vendor-specific security protocols and dedicated support, often resulting in optimized stability and tailored protection measures for specialized robotic applications. Both approaches balance security and reliability differently: ROS leverages collaborative improvements and adaptability, while proprietary OS emphasizes integrated safeguards and consistent performance under rigorous testing.
Integration and Compatibility
Robot Operating System (ROS) offers extensive integration capabilities with various hardware platforms and open-source software, enabling seamless communication and compatibility across diverse robotic components. Proprietary operating systems often provide tailored solutions optimized for specific hardware but may limit interoperability and third-party integration options. You benefit from ROS's modular architecture, which supports a broad ecosystem of sensors, actuators, and algorithms, enhancing flexibility in developing complex robotic applications.
Choosing the Right OS for Your Robotics Project
Choosing the right OS for your robotics project hinges on factors like flexibility, community support, and real-time capabilities. Robot Operating System (ROS) offers open-source modularity, a vast database of pre-built robotics algorithms, and extensive developer collaboration, making it ideal for research and rapid prototyping. Proprietary OS options typically provide optimized performance, dedicated vendor support, and enhanced security features, better suited for commercial applications requiring strict stability and compliance.
Robot Operating System vs Proprietary OS Infographic