Time-of-flight cameras measure the distance to objects by calculating the time light takes to reflect back, offering precise depth maps even in low-light conditions. Your choice depends on whether you prioritize accurate depth sensing in varied lighting (time-of-flight) or capturing detailed texture and color information alongside depth from dual images (stereo camera).
Table of Comparison
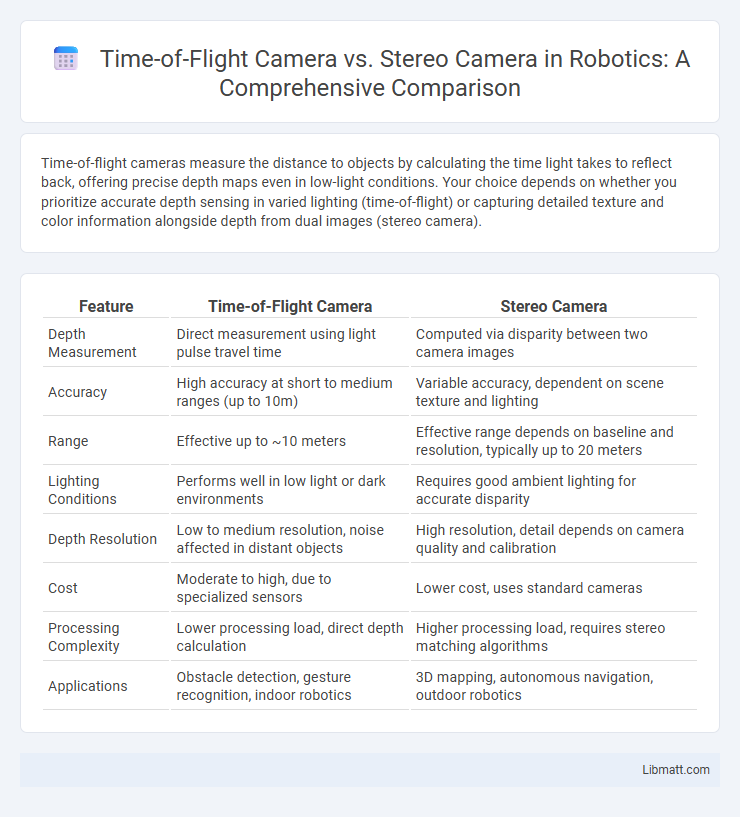
| Feature | Time-of-Flight Camera | Stereo Camera |
|---|---|---|
| Depth Measurement | Direct measurement using light pulse travel time | Computed via disparity between two camera images |
| Accuracy | High accuracy at short to medium ranges (up to 10m) | Variable accuracy, dependent on scene texture and lighting |
| Range | Effective up to ~10 meters | Effective range depends on baseline and resolution, typically up to 20 meters |
| Lighting Conditions | Performs well in low light or dark environments | Requires good ambient lighting for accurate disparity |
| Depth Resolution | Low to medium resolution, noise affected in distant objects | High resolution, detail depends on camera quality and calibration |
| Cost | Moderate to high, due to specialized sensors | Lower cost, uses standard cameras |
| Processing Complexity | Lower processing load, direct depth calculation | Higher processing load, requires stereo matching algorithms |
| Applications | Obstacle detection, gesture recognition, indoor robotics | 3D mapping, autonomous navigation, outdoor robotics |
Introduction to Depth-Sensing Technologies
Time-of-flight (ToF) cameras measure depth by calculating the time it takes for emitted light to return to the sensor, enabling precise distance mapping in real-time. Stereo cameras create depth information by capturing two slightly offset images and computing disparities between them to estimate distance. Both technologies are essential in applications like autonomous vehicles, robotics, and augmented reality but differ in accuracy, environmental sensitivity, and computational requirements.
Overview of Time-of-Flight Cameras
Time-of-flight (ToF) cameras capture depth information by measuring the time it takes for emitted infrared light to reflect off objects and return to the sensor, enabling accurate 3D imaging in real-time. Unlike stereo cameras that rely on matching features between two lenses to estimate depth, ToF cameras provide direct distance measurements, resulting in faster and more reliable depth mapping, especially in low-light conditions. Your applications in robotics, augmented reality, and industrial automation benefit from the precise spatial data delivered by ToF technology.
Overview of Stereo Cameras
Stereo cameras utilize two or more lenses spaced apart to mimic human binocular vision, capturing depth information by comparing the disparity between multiple images. This technology excels in providing high-resolution 3D maps of your environment, making it ideal for applications requiring detailed spatial analysis. Unlike time-of-flight cameras, stereo systems rely on ambient light and complex image processing algorithms to calculate depth, which can be affected by lighting conditions.
Working Principles: ToF vs Stereo
Time-of-flight (ToF) cameras measure distance by calculating the time it takes for emitted light to bounce back from an object, providing direct depth information through precise timing of light pulses. Stereo cameras work by capturing images from two lenses spaced apart, simulating human binocular vision, and computing depth via disparity mapping between the two images. Your choice depends on application needs: ToF excels in low-light and real-time depth sensing, while stereo cameras perform well in high-resolution, texture-rich environments.
Accuracy and Depth Perception
Time-of-flight cameras provide highly accurate depth measurements by calculating the time it takes for emitted light to reflect back, resulting in precise distance mapping even in low-light conditions. Stereo cameras rely on dual lenses to simulate human binocular vision, generating depth perception through disparity calculations but may struggle in textureless or uniform scenes. Your choice depends on requiring precise, real-time depth accuracy (favoring time-of-flight) versus detailed environmental mapping with color information (favoring stereo cameras).
Performance in Varying Lighting Conditions
Time-of-flight cameras perform reliably in low-light and dark environments by actively emitting infrared light, ensuring accurate depth measurements regardless of ambient lighting. Stereo cameras rely on ambient light and struggle in low-light or high-glare conditions, often producing noisy or incomplete depth maps. Your choice should consider the specific lighting environments where consistent depth perception is critical for optimal performance.
Range and Resolution Comparison
Time-of-flight cameras provide accurate depth measurement over a moderate range, typically up to 10 meters, with lower resolution due to their reliance on sensor size and ambient light conditions. Stereo cameras capture higher resolution images and excel at longer ranges, sometimes exceeding 100 meters, by computing depth from two RGB images but may struggle with low-texture environments. Your choice depends on whether you prioritize precise depth sensing at close range or detailed imagery suitable for extended distances.
Cost and Hardware Complexity
Time-of-flight (ToF) cameras typically involve higher costs and greater hardware complexity due to their specialized sensors and illumination systems required for precise depth measurement. Stereo cameras offer a more cost-effective solution by using two or more conventional cameras to compute depth through image disparity, but they demand significant processing power and calibration efforts to achieve accuracy. Your choice depends on balancing budget constraints with the desired precision and integration complexity for your application.
Application Areas and Use Cases
Time-of-flight cameras excel in robotics, autonomous vehicles, and augmented reality by providing precise depth measurements for obstacle detection and gesture recognition. Stereo cameras are widely used in 3D reconstruction, surveillance, and virtual reality due to their ability to generate detailed depth maps from two different viewpoints. Both technologies enable advanced computer vision applications but differ in performance based on environmental conditions and required accuracy.
Choosing the Right Camera for Your Needs
Time-of-flight cameras offer precise depth measurements by capturing the time it takes for light to return, making them ideal for applications requiring fast and accurate 3D data. Stereo cameras rely on two lenses to calculate depth through image disparity, providing higher resolution color imagery but potentially less accuracy in low-light or reflective conditions. You should consider factors like environmental conditions, required depth accuracy, and real-time processing needs when selecting the right camera for your project.
Time-of-flight camera vs Stereo camera Infographic