Forward kinematics calculates the position and orientation of a robot's end-effector based on known joint parameters, providing precise control over each joint movement. Inverse kinematics determines the required joint angles to achieve a desired end-effector position, enabling you to plan and execute complex tasks effectively.
Table of Comparison
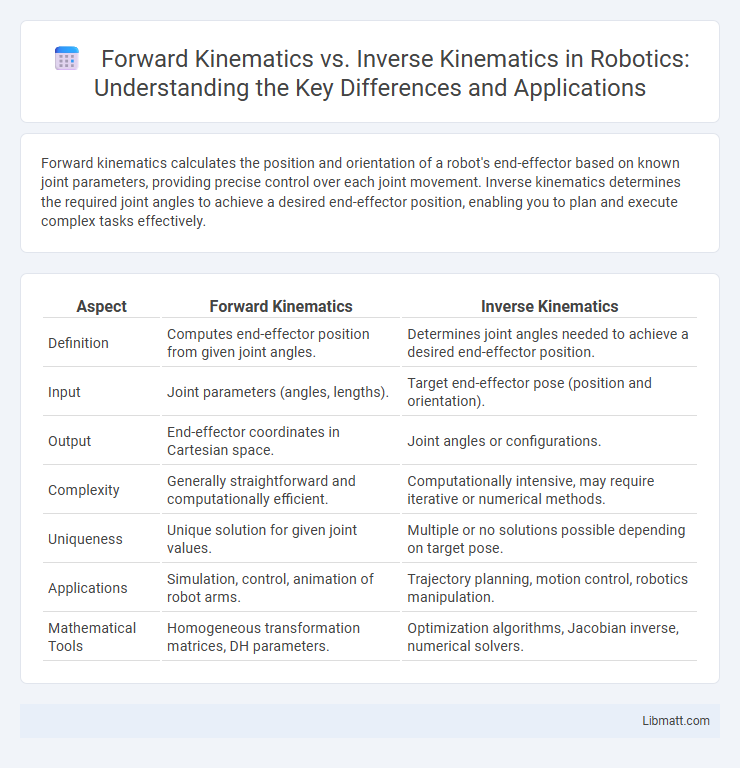
| Aspect | Forward Kinematics | Inverse Kinematics |
|---|---|---|
| Definition | Computes end-effector position from given joint angles. | Determines joint angles needed to achieve a desired end-effector position. |
| Input | Joint parameters (angles, lengths). | Target end-effector pose (position and orientation). |
| Output | End-effector coordinates in Cartesian space. | Joint angles or configurations. |
| Complexity | Generally straightforward and computationally efficient. | Computationally intensive, may require iterative or numerical methods. |
| Uniqueness | Unique solution for given joint values. | Multiple or no solutions possible depending on target pose. |
| Applications | Simulation, control, animation of robot arms. | Trajectory planning, motion control, robotics manipulation. |
| Mathematical Tools | Homogeneous transformation matrices, DH parameters. | Optimization algorithms, Jacobian inverse, numerical solvers. |
Introduction to Kinematics in Robotics
Forward kinematics in robotics calculates the position and orientation of a robot's end-effector based on given joint parameters, using known geometric relationships. Inverse kinematics involves determining the joint parameters required to achieve a desired end-effector position and orientation, often solved through numerical methods or analytical equations. Both approaches are fundamental in robot motion planning and control, enabling precise manipulation and task execution.
What is Forward Kinematics?
Forward kinematics calculates the position and orientation of a robot's end effector by using the known joint parameters, such as angles or displacements. This process follows the kinematic chain from the robot's base to its contact point, allowing precise control of movements based on joint configurations. Understanding forward kinematics helps you predict the spatial arrangement of robotic parts in tasks like manipulation and animation accurately.
What is Inverse Kinematics?
Inverse kinematics is a computational method used in robotics and animation to determine the joint parameters needed to place the end-effector of a manipulator or character at a desired position and orientation. Unlike forward kinematics, which calculates the end-effector's position based on given joint angles, inverse kinematics solves the reverse problem, often involving complex nonlinear equations and requiring numerical techniques. You rely on inverse kinematics for precise motion control in applications such as robot arm manipulation, character rigging, and virtual reality interactions.
Key Differences Between Forward and Inverse Kinematics
Forward kinematics calculates the position and orientation of a robotic end-effector based on given joint parameters, using direct mathematical equations to determine the spatial configuration. Inverse kinematics, conversely, derives joint parameters required to achieve a desired end-effector position and orientation, often solving complex nonlinear equations with multiple possible solutions. The key difference lies in forward kinematics being a straightforward, deterministic process, while inverse kinematics is computationally intensive and may require iterative methods or optimization to handle redundancy and constraints.
Mathematical Formulations and Calculations
Forward kinematics involves calculating the position and orientation of a robot's end-effector based on known joint parameters using direct geometric equations and transformation matrices. Inverse kinematics requires solving nonlinear equations to determine the necessary joint angles for a desired end-effector position, often employing iterative numerical methods or closed-form solutions. Your understanding of these mathematical formulations is crucial for precise robotic control and motion planning.
Applications of Forward Kinematics
Forward kinematics is widely applied in robotics for determining the position and orientation of a robot's end-effector based on given joint parameters, crucial for precise control in manufacturing automation and robotic surgery. It enables real-time simulation and motion planning in computer graphics, animation, and virtual reality, where predicting limb or object positions from joint angles is essential. Forward kinematics also supports robotic path optimization and collision detection by providing accurate spatial configurations from joint space inputs.
Applications of Inverse Kinematics
Inverse kinematics is extensively applied in robotics for precise control of robotic arms, enabling tasks such as assembly, welding, and surgical procedures by calculating joint parameters to achieve desired end-effector positions. In computer animation and gaming, inverse kinematics allows for natural and realistic character movements by determining limb positions based on target points. This technique is essential in virtual reality and humanoid robot navigation to facilitate real-time adaptation to dynamic environments and enhance interaction accuracy.
Challenges and Limitations in Each Approach
Forward kinematics involves calculating the end-effector position from known joint parameters, facing challenges in handling complex robotic structures and non-linearities that can lead to cumulative errors in precise tasks. Inverse kinematics requires solving nonlinear equations to determine joint parameters from a desired end-effector position, often resulting in multiple or no solutions, making real-time control computationally intensive and sometimes unstable. Both approaches struggle with singularities and joint constraints, limiting their effectiveness in dynamic and high-degree-of-freedom robotic systems.
Choosing the Right Method for Your Robotics Project
Forward kinematics calculates the position and orientation of a robot's end-effector based on known joint parameters, making it ideal for precise motion planning with simple robotic arms. Inverse kinematics determines the joint configurations needed to reach a desired end-effector position, which is essential for complex robots requiring flexible, goal-oriented movements. Your choice depends on the complexity of your robot and task requirements, with forward kinematics providing straightforward solutions and inverse kinematics offering adaptability for dynamic environments.
Future Trends in Robotic Kinematics
Future trends in robotic kinematics emphasize the integration of machine learning algorithms to improve the accuracy and adaptability of both forward and inverse kinematics solutions. Advances in real-time data processing and sensor fusion enable robots to perform complex tasks with enhanced precision in dynamic environments, pushing the boundaries of autonomous operation. Research is increasingly focused on optimizing kinematic computations for soft robotics and humanoid robots, where non-linear and high-degree-of-freedom systems demand innovative approaches for real-time control.
Forward kinematics vs Inverse kinematics Infographic