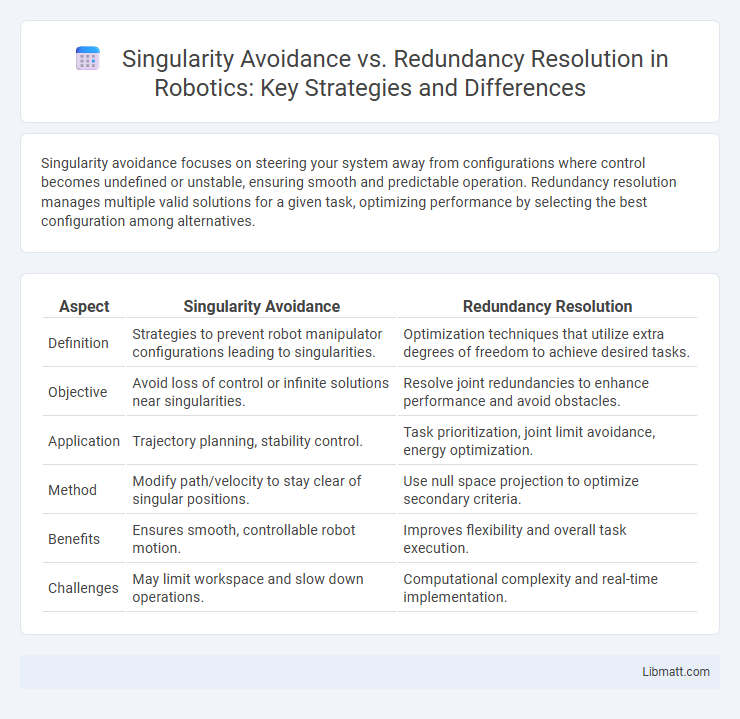
Singularity avoidance focuses on steering your system away from configurations where control becomes undefined or unstable, ensuring smooth and predictable operation. Redundancy resolution manages multiple valid solutions for a given task, optimizing performance by selecting the best configuration among alternatives.
Table of Comparison
| Aspect | Singularity Avoidance | Redundancy Resolution |
|---|---|---|
| Definition | Strategies to prevent robot manipulator configurations leading to singularities. | Optimization techniques that utilize extra degrees of freedom to achieve desired tasks. |
| Objective | Avoid loss of control or infinite solutions near singularities. | Resolve joint redundancies to enhance performance and avoid obstacles. |
| Application | Trajectory planning, stability control. | Task prioritization, joint limit avoidance, energy optimization. |
| Method | Modify path/velocity to stay clear of singular positions. | Use null space projection to optimize secondary criteria. |
| Benefits | Ensures smooth, controllable robot motion. | Improves flexibility and overall task execution. |
| Challenges | May limit workspace and slow down operations. | Computational complexity and real-time implementation. |
Understanding Robotic Singularity: Definition and Impact
Robotic singularity occurs when a robot's Jacobian matrix loses rank, causing a loss of degrees of freedom and unpredictable manipulator behavior. This condition impacts control by making certain movements impossible or requiring infinite joint velocities, risking damage or failure. Understanding singularity is essential for your robot's path planning and maintaining smooth, stable operation during complex tasks.
The Challenge of Redundancy in Robotic Systems
Redundancy in robotic systems arises when a robot has more degrees of freedom than necessary to perform a task, creating infinite possible configurations and complicating control algorithms. Singularity avoidance is critical to prevent configurations where the robot loses degrees of freedom, causing instability or loss of precision in motion execution. Effective redundancy resolution techniques prioritize task performance while maintaining manipulability, ensuring smooth operation near singularities and enhancing overall robotic system robustness.
Singularity Avoidance: Concepts and Approaches
Singularity avoidance in robotics involves detecting and circumventing configurations where a robot's Jacobian matrix loses rank, causing infinite joint velocities and loss of control precision. Common approaches include enhanced kinematic models, damped least squares inversion, and null-space projection methods to maintain smooth motion trajectories. These techniques prioritize system stability and safety by predicting and adjusting robot posture before encountering singularities.
Redundancy Resolution: Methods and Importance
Redundancy resolution in robotics involves algorithms such as the pseudo-inverse method, null space projection, and optimization-based approaches to manage multiple degrees of freedom effectively. These methods are crucial for ensuring precise control and flexibility when a robotic manipulator faces singularities or requires a specific end-effector orientation. Your robotic system's performance and stability depend significantly on implementing robust redundancy resolution techniques to avoid the pitfalls of singularity and maintain smooth operation.
Mathematical Foundations: Jacobian and Inverse Kinematics
Singularity avoidance and redundancy resolution both rely on the Jacobian matrix to describe the relationship between joint velocities and end-effector velocities in robotic kinematics. Singularity avoidance focuses on maintaining a non-singular Jacobian by detecting and steering clear of configurations where the determinant approaches zero, thereby preventing loss of manipulability and control. Redundancy resolution leverages inverse kinematics through pseudo-inverse or null-space projection methods to compute joint velocities that achieve desired end-effector motions while optimizing secondary criteria or avoiding singular configurations.
Comparing Singularity Avoidance and Redundancy Resolution
Singularity avoidance focuses on steering robotic joints away from configurations where control algorithms may break down, preventing loss of degrees of freedom and ensuring smooth motion. Redundancy resolution manages extra degrees of freedom in robotic systems by optimizing joint configurations to achieve secondary goals like obstacle avoidance or minimizing energy consumption. Your robotic system benefits most by integrating singularity avoidance to maintain stability while using redundancy resolution to enhance flexibility and task efficiency.
Algorithmic Techniques for Motion Planning
Algorithmic techniques for motion planning in singularity avoidance focus on identifying and circumventing configurations where the robot's Jacobian matrix loses rank, preventing loss of control or infinite joint velocities. Redundancy resolution algorithms exploit the robot's extra degrees of freedom to optimize secondary objectives such as obstacle avoidance or energy efficiency, often using methods like pseudoinverse solutions and null space projections. You can enhance motion planning robustness by combining singularity detection algorithms with redundancy resolution strategies to maintain smooth and feasible trajectories.
Practical Applications: Industrial and Service Robotics
Singularity avoidance in industrial robotics ensures smooth operation by preventing arm configurations that cause loss of control or infinite joint velocities, critical for tasks requiring precision such as welding and assembly. Redundancy resolution enhances robotic flexibility in service robotics by optimizing joint movements to avoid obstacles and improve task efficiency in dynamic environments like healthcare or logistics. Your robot's performance and safety benefits significantly from integrating these strategies to handle complex tasks while maintaining stability and adaptability.
Optimization Strategies: Performance vs Stability
Singularity avoidance techniques prioritize stability by steering clear of configurations where robotic manipulators lose degrees of freedom, ensuring smooth and safe operation but often sacrificing optimal performance. Redundancy resolution algorithms focus on performance optimization by exploiting extra degrees of freedom to achieve secondary objectives like obstacle avoidance or energy efficiency, which may increase susceptibility to singularities and instability. Balancing these approaches requires advanced optimization strategies that integrate real-time monitoring of manipulator Jacobians with task-specific performance metrics to maintain robust control without compromising efficiency.
Future Trends in Robotics: Toward Safer Manipulators
Future trends in robotics emphasize singularity avoidance to prevent loss of manipulator control and ensure smooth operation near critical joint configurations. Redundancy resolution techniques optimize manipulator redundancy by distributing joint motions to maintain dexterity and improve fault tolerance. Your robotic systems will benefit from combining these strategies to enhance safety, reliability, and efficiency in complex, dynamic environments.
Singularity Avoidance vs Redundancy Resolution Infographic