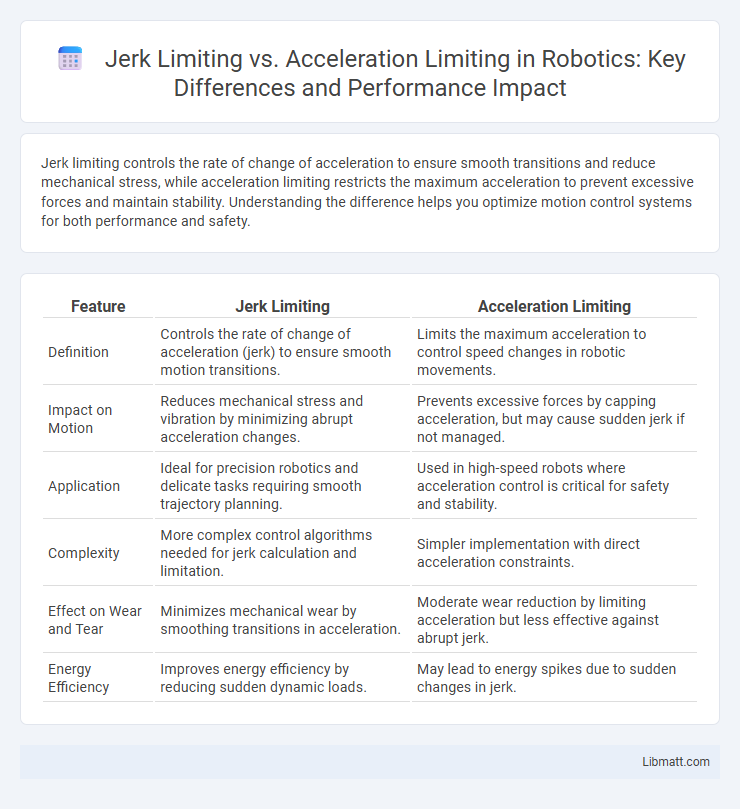
Jerk limiting controls the rate of change of acceleration to ensure smooth transitions and reduce mechanical stress, while acceleration limiting restricts the maximum acceleration to prevent excessive forces and maintain stability. Understanding the difference helps you optimize motion control systems for both performance and safety.
Table of Comparison
| Feature | Jerk Limiting | Acceleration Limiting |
|---|---|---|
| Definition | Controls the rate of change of acceleration (jerk) to ensure smooth motion transitions. | Limits the maximum acceleration to control speed changes in robotic movements. |
| Impact on Motion | Reduces mechanical stress and vibration by minimizing abrupt acceleration changes. | Prevents excessive forces by capping acceleration, but may cause sudden jerk if not managed. |
| Application | Ideal for precision robotics and delicate tasks requiring smooth trajectory planning. | Used in high-speed robots where acceleration control is critical for safety and stability. |
| Complexity | More complex control algorithms needed for jerk calculation and limitation. | Simpler implementation with direct acceleration constraints. |
| Effect on Wear and Tear | Minimizes mechanical wear by smoothing transitions in acceleration. | Moderate wear reduction by limiting acceleration but less effective against abrupt jerk. |
| Energy Efficiency | Improves energy efficiency by reducing sudden dynamic loads. | May lead to energy spikes due to sudden changes in jerk. |
Introduction to Motion Control Constraints
Jerk limiting and acceleration limiting are critical motion control constraints that enhance system stability and precision in robotics and machinery. Jerk limiting restricts the rate of change of acceleration to minimize mechanical stress and vibration, improving component longevity and ride comfort. Acceleration limiting regulates the maximum acceleration to ensure safe and controlled movements, preventing slip or loss of control in dynamic systems.
Defining Jerk Limiting
Jerk limiting controls the rate of change of acceleration, ensuring smooth transitions in motion to prevent mechanical stress or discomfort. Unlike acceleration limiting, which restricts how quickly speed increases, jerk limiting targets sudden shifts in acceleration to enhance system stability. Your motion system benefits from jerk limiting by maintaining precise control and reducing wear on components.
Understanding Acceleration Limiting
Acceleration limiting controls the rate at which your vehicle increases speed, ensuring smooth and safe transitions by preventing sudden spikes in acceleration. Unlike jerk limiting, which restricts the change in acceleration over time (jerk), acceleration limiting focuses on capping the acceleration magnitude itself to enhance driving stability. Understanding acceleration limiting helps optimize performance by maintaining consistent speed control while reducing mechanical stress and improving passenger comfort.
Key Differences Between Jerk and Acceleration Limiting
Jerk limiting controls the rate of change of acceleration, ensuring smooth transitions and reducing mechanical stress, while acceleration limiting directly restricts the acceleration magnitude to prevent system overload or instability. Jerk limiting improves motion quality by minimizing sudden shocks, which is critical in precision machining and robotics, whereas acceleration limiting primarily safeguards against excessive forces that could damage components or compromise safety. Understanding these key differences helps engineers design control systems that optimize both performance and durability.
Impact on Motion Smoothness
Jerk limiting significantly enhances motion smoothness by controlling the rate of change of acceleration, resulting in gentle, fluid transitions that reduce mechanical stress and improve user comfort. Acceleration limiting only restricts the velocity increase rate, often leading to abrupt changes in jerk that can cause vibrations or jolts. Optimizing jerk limits ensures seamless motion profiles, crucial for precision robotics, CNC machines, and vehicle dynamics where smooth operation directly affects performance and safety.
Applications of Jerk Limiting
Jerk limiting is crucial in applications requiring smooth motion transitions, such as robotics, CNC machining, and elevator control systems, where sudden changes in acceleration can cause mechanical stress and reduce precision. Your equipment benefits from jerk limiting by minimizing vibrations, enhancing component lifespan, and improving overall performance during start-stop movements. These advantages make jerk limiting indispensable in industries demanding high accuracy and reduced wear.
Use Cases for Acceleration Limiting
Acceleration limiting is essential in applications requiring smooth and controlled speed changes, such as electric vehicles, robotics, and industrial machinery. By preventing abrupt increases in acceleration, it enhances passenger comfort, prolongs equipment life, and improves safety in automated systems. Your system's performance and reliability benefit significantly from integrating acceleration limiting in scenarios involving delicate operations or precision motion control.
Performance and Efficiency Comparison
Jerk limiting enhances vehicle control and ride comfort by smoothing sudden changes in acceleration, leading to more precise performance in dynamic driving conditions. Acceleration limiting optimizes energy efficiency by capping the maximum acceleration, reducing powertrain stress and improving fuel economy or battery life. Jerk limiting prioritizes smoothness and handling precision, while acceleration limiting focuses on energy management and powertrain durability.
Challenges in Implementation
Implementing jerk limiting requires precise real-time control algorithms to smoothly manage sudden changes in acceleration, demanding high computational resources and sensor accuracy. Acceleration limiting faces challenges in balancing responsiveness and safety, as overly restrictive limits can reduce system performance, while insufficient limits risk mechanical strain and safety hazards. Both strategies necessitate sophisticated integration with vehicle dynamics models to ensure seamless operation without sacrificing comfort or control fidelity.
Choosing the Right Limiting Technique
Choosing the right limiting technique depends on the specific application requirements and desired system response. Jerk limiting controls the rate of change of acceleration, providing smoother transitions that reduce mechanical stress and improve ride comfort. Acceleration limiting directly restricts acceleration magnitude, ensuring quick response but potentially causing abrupt movements; your choice impacts overall system stability and user experience.
Jerk Limiting vs Acceleration Limiting Infographic