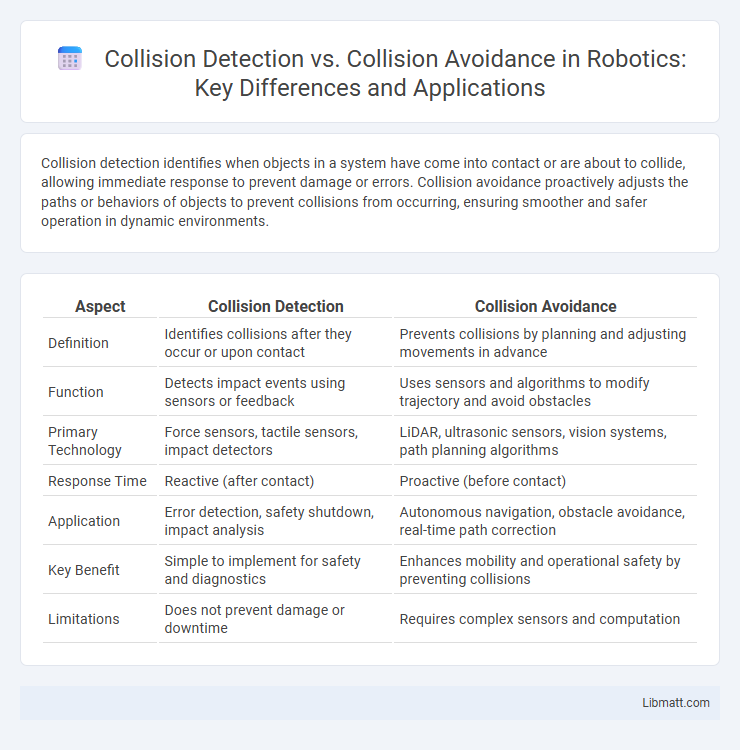
Collision detection identifies when objects in a system have come into contact or are about to collide, allowing immediate response to prevent damage or errors. Collision avoidance proactively adjusts the paths or behaviors of objects to prevent collisions from occurring, ensuring smoother and safer operation in dynamic environments.
Table of Comparison
| Aspect | Collision Detection | Collision Avoidance |
|---|---|---|
| Definition | Identifies collisions after they occur or upon contact | Prevents collisions by planning and adjusting movements in advance |
| Function | Detects impact events using sensors or feedback | Uses sensors and algorithms to modify trajectory and avoid obstacles |
| Primary Technology | Force sensors, tactile sensors, impact detectors | LiDAR, ultrasonic sensors, vision systems, path planning algorithms |
| Response Time | Reactive (after contact) | Proactive (before contact) |
| Application | Error detection, safety shutdown, impact analysis | Autonomous navigation, obstacle avoidance, real-time path correction |
| Key Benefit | Simple to implement for safety and diagnostics | Enhances mobility and operational safety by preventing collisions |
| Limitations | Does not prevent damage or downtime | Requires complex sensors and computation |
Introduction to Collision Detection and Avoidance
Collision detection involves identifying when two or more objects intersect or come into contact within a virtual or physical space, utilizing algorithms that process spatial data and sensor inputs to pinpoint collision points. Collision avoidance extends this concept by implementing real-time responses to predicted collisions, using path planning and dynamic adjustments to prevent impacts before they occur. These systems are critical in robotics, autonomous vehicles, and gaming to ensure safe navigation and interaction within complex environments.
Defining Collision Detection
Collision detection refers to the computational process of identifying when two or more objects intersect or come into contact within a virtual or physical environment. This technique is essential in simulations, robotics, and video games to ensure realistic interactions and prevent overlapping of objects. By analyzing object positions and boundaries, collision detection helps systems respond appropriately by triggering events or actions based on detected collisions.
Defining Collision Avoidance
Collision avoidance refers to the proactive process of detecting potential collisions and taking timely actions to prevent them from occurring, often through real-time sensor data and automated control systems. Unlike collision detection, which identifies when an impact has already happened or begun, collision avoidance aims to anticipate and mitigate risks before any contact. This approach is widely applied in autonomous vehicles, robotics, and aviation to enhance safety and operational efficiency.
Key Differences Between Detection and Avoidance
Collision detection identifies when two or more objects have contacted or overlapped by analyzing sensor data or simulations, enabling systems to recognize incidents after or during impact. Collision avoidance predicts potential collisions using real-time data and algorithms to adjust trajectories or behaviors proactively, preventing contact before it occurs. The key difference lies in detection responding to actual collisions, while avoidance anticipates and prevents collisions, enhancing safety and operational efficiency.
Technologies Used in Collision Detection
Collision detection relies on technologies such as ultrasonic sensors, LIDAR, radar, and computer vision systems to accurately identify potential impacts in real time. These sensors generate detailed environmental data that algorithms process to detect objects, estimate distances, and predict collision risks. Integration of machine learning enhances detection accuracy by interpreting complex scenarios in autonomous vehicles and robotics.
Technologies Used in Collision Avoidance
Collision avoidance technologies utilize advanced sensors such as LiDAR, radar, and ultrasonic systems to detect potential obstacles in real-time, enabling proactive measures to prevent accidents. Machine learning algorithms and computer vision techniques process sensor data to predict collision risks and execute automatic braking or steering adjustments. Integration with vehicle-to-everything (V2X) communication enhances situational awareness by exchanging traffic data between vehicles and infrastructure, further improving collision avoidance capabilities.
Applications in Robotics and Autonomous Systems
Collision detection in robotics and autonomous systems identifies when two or more objects intersect, enabling real-time responses to prevent damage or operational failure. Collision avoidance, on the other hand, proactively plans paths and adjusts movements using sensors and algorithms to prevent potential collisions before they occur. Your autonomous vehicle or robotic system relies on integrating both techniques to ensure safe navigation and efficient performance in dynamic environments.
Challenges in Implementing Collision Strategies
Implementing collision detection faces challenges such as accurately sensing dynamic environments and minimizing false positives, which can lead to unnecessary stops or errors. Collision avoidance requires complex algorithms to predict object trajectories and make real-time decisions, demanding significant computational power and sensor integration. Your system must balance responsiveness and accuracy to ensure safe navigation without compromising efficiency.
Impact on Safety and Efficiency
Collision detection systems enhance safety by identifying imminent collisions through sensors and alerting drivers or automated systems to take corrective actions, minimizing accidents and injuries. In contrast, collision avoidance technologies actively intervene by controlling vehicle speed and direction to prevent collisions, significantly improving both safety and traffic flow efficiency. Integrating both detection and avoidance mechanisms optimizes overall transportation safety and operational performance by reducing crash occurrences and minimizing traffic disruptions.
Future Trends in Collision Management
Future trends in collision management emphasize the integration of advanced AI algorithms and machine learning for real-time collision detection and avoidance, enhancing accuracy and response times. Sensor fusion technology combining LiDAR, radar, and cameras will revolutionize how systems predict and prevent collisions in autonomous vehicles and robotics. Your safety will increasingly rely on predictive analytics and adaptive systems that continuously learn from environmental data to minimize accident risks proactively.
Collision detection vs Collision avoidance Infographic