Path planning involves creating an optimal route from a start to a goal location, considering obstacles and constraints, while path following focuses on accurately tracking a pre-defined path in real-time. Your system's performance depends on balancing efficient path planning algorithms with robust path following control strategies to ensure smooth and safe navigation.
Table of Comparison
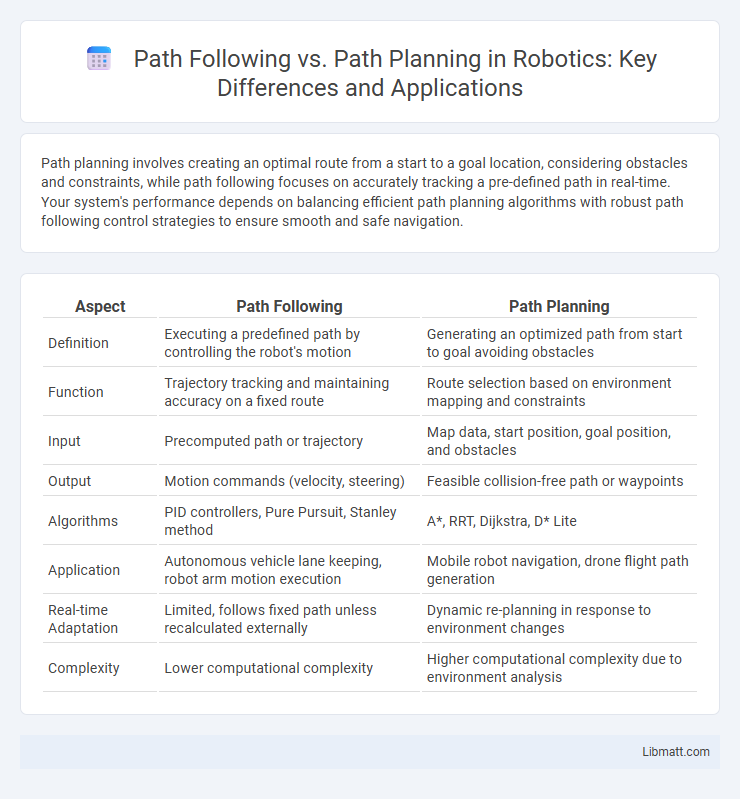
| Aspect | Path Following | Path Planning |
|---|---|---|
| Definition | Executing a predefined path by controlling the robot's motion | Generating an optimized path from start to goal avoiding obstacles |
| Function | Trajectory tracking and maintaining accuracy on a fixed route | Route selection based on environment mapping and constraints |
| Input | Precomputed path or trajectory | Map data, start position, goal position, and obstacles |
| Output | Motion commands (velocity, steering) | Feasible collision-free path or waypoints |
| Algorithms | PID controllers, Pure Pursuit, Stanley method | A*, RRT, Dijkstra, D* Lite |
| Application | Autonomous vehicle lane keeping, robot arm motion execution | Mobile robot navigation, drone flight path generation |
| Real-time Adaptation | Limited, follows fixed path unless recalculated externally | Dynamic re-planning in response to environment changes |
| Complexity | Lower computational complexity | Higher computational complexity due to environment analysis |
Introduction to Path Following and Path Planning
Path planning involves generating an optimal route from a start point to a goal within a defined environment, utilizing algorithms such as A*, RRT, or Dijkstra's to ensure obstacle avoidance and efficiency. Path following focuses on the control mechanisms that guide a robot or vehicle along the pre-computed path by maintaining trajectory adherence using techniques like PID controllers or model predictive control. Both concepts are fundamental in robotics and autonomous systems, where path planning establishes the waypoints and path following ensures precise execution of movement along those waypoints.
Defining Path Following
Path following refers to the process where a vehicle or robot is controlled to accurately track and move along a predetermined path or trajectory in real-time. Unlike path planning, which involves generating an optimal route from start to goal considering obstacles and constraints, path following focuses on executing this route with precise control inputs to maintain stability and position accuracy. Your system's ability to respond dynamically to deviations and maintain alignment with the defined path is critical for effective path following performance.
Defining Path Planning
Path planning involves determining the optimal route from a starting point to a desired destination within an environment, considering obstacles, constraints, and goals. It requires algorithms that map out feasible paths in a spatial domain, often utilizing techniques such as A*, Dijkstra's, or RRT to ensure collision-free navigation. Your autonomous system relies on path planning to generate strategic movement plans before execution, differentiating it from path following, which emphasizes tracking and adhering to a predetermined path.
Core Differences Between Path Following and Path Planning
Path planning involves generating an optimal route from a start point to a destination while considering obstacles, environment constraints, and system dynamics. Path following, on the other hand, focuses on controlling a vehicle or robot to accurately track and adhere to a predefined path generated by the path planner. Core differences include the emphasis on route generation in path planning versus real-time trajectory tracking and execution precision in path following.
Key Algorithms Used in Path Planning
Key algorithms used in path planning include A* (A-star), which efficiently finds the shortest path using heuristics; Dijkstra's algorithm, renowned for guaranteeing the shortest path in weighted graphs; and Rapidly-exploring Random Trees (RRT), effective in high-dimensional spaces for exploring feasible paths. Probabilistic Roadmaps (PRM) also play a crucial role in path planning by building a graph of random samples to find collision-free routes in complex environments. These algorithms differ from path following techniques, which focus on tracking and controlling a pre-determined path rather than generating one.
Algorithms and Methods for Path Following
Path following algorithms prioritize maintaining a vehicle's trajectory along a predefined path using control methods such as Pure Pursuit, Stanley Controller, and Model Predictive Control (MPC). These techniques adjust steering commands in real-time based on vehicle position, heading, and dynamic constraints to minimize cross-track error and ensure smooth motion. Advanced methods incorporate sensor data fusion and adaptive control to handle uncertainties and varying environmental conditions effectively.
Applications of Path Planning in Robotics
Path planning in robotics enables autonomous navigation by computing optimal routes for robots to reach targets while avoiding obstacles. Applications include warehouse automation, where robots efficiently transport goods, and autonomous vehicles, which rely on dynamic path planning for safe navigation in complex environments. Your robotic systems benefit from advanced path planning algorithms that enhance precision and adaptability in real-world scenarios.
Real-World Use Cases for Path Following
Path Following plays a critical role in autonomous vehicles, robotic vacuum cleaners, and drone navigation by enabling precise adherence to predetermined routes. Your self-driving car relies on path following algorithms to maintain lane position and safely navigate complex urban environments. These real-world applications demonstrate how path following ensures smooth, reliable movement along predefined trajectories without continuous replanning.
Challenges and Limitations of Each Approach
Path following faces challenges in adapting to dynamic or unpredictable environments due to its reliance on pre-defined trajectories, leading to limited flexibility when encountering obstacles or changes. Path planning must address computational complexity and real-time constraints, often struggling with scalability in high-dimensional spaces or complex terrain. Both approaches encounter limitations in sensor accuracy and environmental uncertainty, impacting overall navigation reliability.
Future Trends in Path Following and Path Planning
Advancements in artificial intelligence and machine learning are driving future trends in path following and path planning, enabling autonomous systems to adapt dynamically to complex environments with enhanced accuracy. Integration of real-time sensor data and predictive analytics is improving obstacle avoidance and route optimization, particularly in autonomous vehicles and robotics. The development of collaborative multi-agent systems is also shaping future capabilities by allowing coordinated path execution across multiple platforms.
Path Following vs Path Planning Infographic