Simultaneous Localization and Mapping (SLAM) enables Your robot or device to construct a map of an unknown environment while simultaneously tracking its precise location within that map. This dual capability is crucial for autonomous navigation, improving accuracy and efficiency in dynamic or unstructured settings.
Table of Comparison
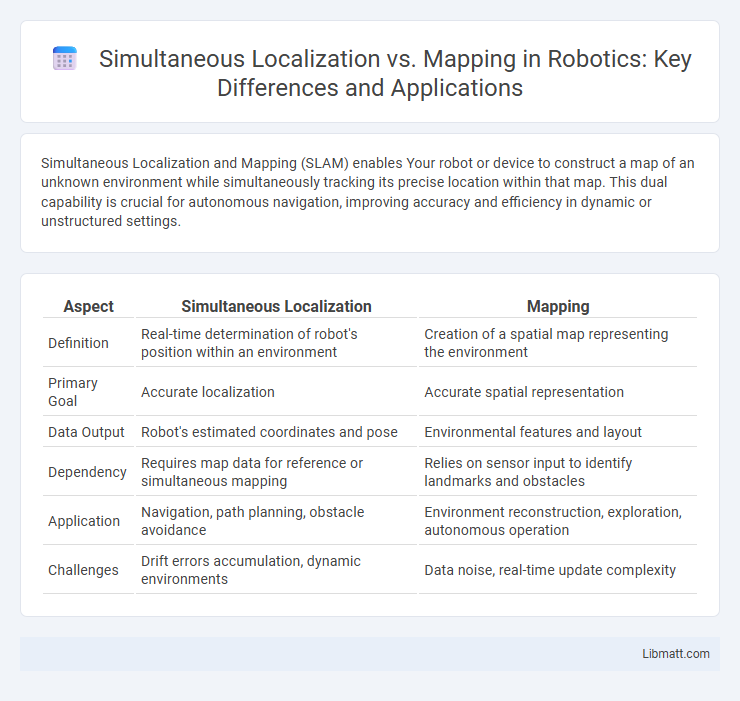
| Aspect | Simultaneous Localization | Mapping |
|---|---|---|
| Definition | Real-time determination of robot's position within an environment | Creation of a spatial map representing the environment |
| Primary Goal | Accurate localization | Accurate spatial representation |
| Data Output | Robot's estimated coordinates and pose | Environmental features and layout |
| Dependency | Requires map data for reference or simultaneous mapping | Relies on sensor input to identify landmarks and obstacles |
| Application | Navigation, path planning, obstacle avoidance | Environment reconstruction, exploration, autonomous operation |
| Challenges | Drift errors accumulation, dynamic environments | Data noise, real-time update complexity |
Introduction to Simultaneous Localization and Mapping (SLAM)
Simultaneous Localization and Mapping (SLAM) is a critical technology in robotics and autonomous systems enabling a robot or device to build a map of an unknown environment while simultaneously determining its position within that map. SLAM integrates sensor data, such as LiDAR, cameras, and inertial measurement units, to perform real-time mapping and localization, essential for navigation in GPS-denied or dynamic environments. Advanced SLAM algorithms leverage probabilistic models and machine learning to enhance accuracy and robustness in diverse applications like autonomous driving, drone flight, and augmented reality.
Defining Localization in Robotics
Localization in robotics refers to the process by which a robot determines its precise position and orientation within a known environment using sensor data and pre-existing maps. It enables autonomous systems to navigate effectively by correlating observed landmarks and features to the map, reducing positional uncertainty. Accurate localization is essential for tasks such as path planning, obstacle avoidance, and executing missions with spatial awareness.
Understanding the Mapping Process
The mapping process in Simultaneous Localization and Mapping (SLAM) involves creating a detailed representation of the environment while the system dynamically tracks its own position. It gathers sensor data such as LIDAR, cameras, or sonar to identify landmarks and obstacles, constructing an accurate spatial model in real time. Your robot or device relies on this continuous map update to navigate efficiently and adapt to changing surroundings.
Key Differences Between Localization and Mapping
Localization focuses on determining your precise position within a known environment, using sensor data and pre-existing maps. Mapping involves creating a representation of an unknown environment by collecting and integrating sensor information to build accurate spatial maps. The key difference lies in localization relying on established maps for position estimation, whereas mapping generates the map itself for future localization tasks.
Importance of Accurate Localization
Accurate localization in Simultaneous Localization and Mapping (SLAM) is critical for generating reliable maps and ensuring precise navigation in unknown environments. Poor localization accuracy leads to map inconsistencies, affecting obstacle avoidance and path planning. Your robotic system's effectiveness depends heavily on precise position estimation to build a coherent spatial representation.
Challenges in Environmental Mapping
Environmental mapping during Simultaneous Localization and Mapping (SLAM) faces challenges such as dynamic objects causing inconsistent data, sensor noise leading to inaccurate measurements, and complex, unstructured environments that complicate feature extraction. These factors make it difficult for your SLAM system to maintain an accurate and up-to-date map while localizing precisely. Effective algorithms must robustly handle ambiguity and uncertainty to ensure reliable mapping in diverse, real-world scenarios.
Integration of Localization and Mapping in SLAM
Simultaneous Localization and Mapping (SLAM) integrates localization and mapping by using sensor data to construct a map of an unknown environment while concurrently determining the robot's position within that map. This process employs probabilistic algorithms, such as Extended Kalman Filters or Particle Filters, to update both the map and the robot's pose, minimizing uncertainty and improving accuracy. The tight coupling of localization and mapping enables real-time navigation and dynamic environment adaptation in autonomous systems.
Real-World Applications of Localization and Mapping
Simultaneous Localization and Mapping (SLAM) enables autonomous robots and drones to navigate unknown environments by constructing real-time maps while simultaneously determining their position. Real-world applications include autonomous vehicles for precise navigation in urban areas, robotic vacuum cleaners adapting to dynamic room layouts, and augmented reality devices providing accurate spatial awareness for enhanced user experiences. These technologies are critical in industries such as logistics, agriculture, and emergency response, where accurate localization and mapping improve operational efficiency and safety.
Common Algorithms for Localization and Mapping
Common algorithms for Simultaneous Localization and Mapping (SLAM) include Extended Kalman Filter (EKF), Particle Filter, and Graph-Based SLAM, each designed to estimate the robot's position and map the environment efficiently. EKF SLAM applies linearization techniques for probabilistic state estimation, while Particle Filter SLAM uses a set of weighted samples for non-linear scenarios. Graph-Based SLAM optimizes a pose graph by minimizing errors between robot poses and observed landmarks, enhancing accuracy and scalability in complex environments.
Future Trends in SLAM Technology
Future trends in SLAM technology emphasize advances in sensor fusion, incorporating LiDAR, RGB-D cameras, and inertial measurement units to enhance real-time accuracy and robustness. Machine learning algorithms are increasingly integrated to improve environmental understanding and dynamic scene adaptation. Your applications will benefit from cloud-based SLAM processing and edge computing, enabling scalable and efficient localization and mapping in complex, large-scale environments.
Simultaneous Localization vs Mapping Infographic