Visual servoing dynamically adjusts a robot's movements using real-time feedback from a camera, improving precision and adaptability in complex tasks. Unlike a fixed camera setup, which provides static viewpoints, visual servoing enhances Your system's ability to respond to changes and achieve accurate control in dynamic environments.
Table of Comparison
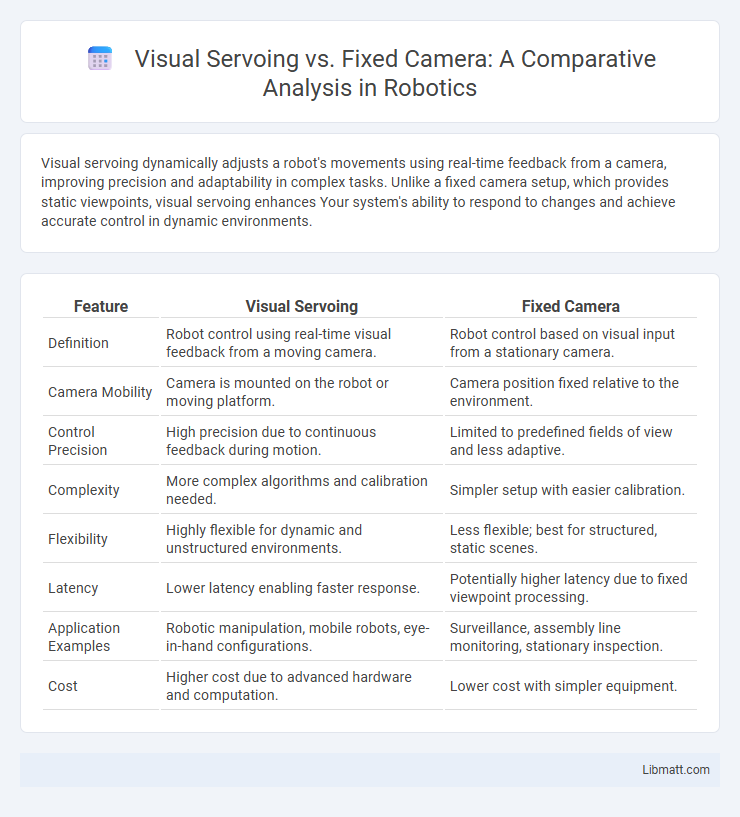
| Feature | Visual Servoing | Fixed Camera |
|---|---|---|
| Definition | Robot control using real-time visual feedback from a moving camera. | Robot control based on visual input from a stationary camera. |
| Camera Mobility | Camera is mounted on the robot or moving platform. | Camera position fixed relative to the environment. |
| Control Precision | High precision due to continuous feedback during motion. | Limited to predefined fields of view and less adaptive. |
| Complexity | More complex algorithms and calibration needed. | Simpler setup with easier calibration. |
| Flexibility | Highly flexible for dynamic and unstructured environments. | Less flexible; best for structured, static scenes. |
| Latency | Lower latency enabling faster response. | Potentially higher latency due to fixed viewpoint processing. |
| Application Examples | Robotic manipulation, mobile robots, eye-in-hand configurations. | Surveillance, assembly line monitoring, stationary inspection. |
| Cost | Higher cost due to advanced hardware and computation. | Lower cost with simpler equipment. |
Introduction to Visual Servoing and Fixed Camera Systems
Visual servoing is a robotic control technique that uses real-time feedback from a camera to dynamically adjust the position and orientation of a robot or machine tool, enhancing accuracy and adaptability in complex tasks. Fixed camera systems rely on stationary cameras that provide a constant viewpoint for monitoring or controlling processes but lack the dynamic responsiveness to changing environments offered by visual servoing. Visual servoing integrates sensor data with robotic motion control, enabling precise manipulation in applications such as robotic assembly and autonomous navigation.
Core Principles of Visual Servoing
Visual servoing relies on real-time feedback from a camera to dynamically adjust a robot's movements, optimizing task precision through continuous image processing and control loop updates. Fixed camera systems, in contrast, use a static viewpoint, limiting adaptability and responsiveness to changes in the environment or object position. Your robotic system benefits from visual servoing's ability to refine actions based on precise spatial information, enhancing accuracy in applications like assembly, manipulation, or navigation.
Key Features of Fixed Camera Setups
Fixed camera setups offer stable and consistent viewpoints, ensuring precise monitoring without the need for complex real-time adjustments inherent in visual servoing systems. These setups are cost-effective, simplify calibration processes, and provide reliable image data crucial for applications like quality inspection and security surveillance. Your operational efficiency benefits from the predictable nature of fixed cameras, which reduce processing overhead and enhance system robustness.
Application Scenarios: When to Use Visual Servoing
Visual servoing is ideal for dynamic environments where real-time feedback is crucial, such as robotic manipulation, assembly lines, and autonomous vehicle navigation. Fixed camera systems perform well in stable, controlled settings where the viewpoint remains constant, like quality inspection or surveillance. Your choice hinges on whether adaptive control based on live visual input is necessary for precise interaction with moving objects.
Application Scenarios: Best Fits for Fixed Camera
Fixed cameras excel in applications requiring stable observation points, such as surveillance systems, industrial quality control, and traffic monitoring, where consistent, wide-area coverage is critical. They are ideal for environments with predictable object trajectories and minimal need for dynamic adjustment, offering high-resolution imagery with reduced complexity. Fixed camera setups also outperform in cost-sensitive projects by minimizing mechanical components and maintenance demands.
Precision and Accuracy Comparison
Visual servoing offers higher precision by continuously adjusting the robot's movements based on real-time image feedback, enabling precise alignment with dynamic targets. Fixed cameras provide consistent accuracy in controlled environments but lack adaptability, resulting in reduced precision when the target or scene changes. Real-time error correction in visual servoing significantly enhances accuracy compared to the static viewpoint of fixed camera setups.
Flexibility and Adaptability in Robotics
Visual servoing offers superior flexibility and adaptability in robotics by continuously adjusting robot movements based on real-time visual feedback, enabling dynamic interaction with changing environments. Fixed cameras provide a static viewpoint, limiting the system's ability to respond to unexpected variations or moving targets effectively. Your robotic applications benefit from visual servoing's ability to handle complex tasks requiring precise and adaptive control, surpassing the constraints of fixed camera setups.
Cost and Implementation Considerations
Visual servoing systems typically involve higher initial costs due to the need for advanced image processing hardware and real-time control algorithms, whereas fixed camera setups are generally more affordable and easier to implement. The complexity of visual servoing requires expertise in computer vision and robotics, impacting deployment time and maintenance resources, while fixed cameras offer straightforward installation with minimal calibration. Your choice between these depends on budget constraints and the desired level of automation precision.
Challenges and Limitations of Each Approach
Visual servoing faces challenges such as sensitivity to lighting changes, occlusions, and real-time processing demands, which can impact accuracy and responsiveness. Fixed camera systems struggle with limited field of view and static perspectives, making it difficult to adapt to dynamic environments or varying object positions. Your choice between these approaches should consider the trade-offs between adaptability and environmental constraints for optimal performance.
Future Trends in Vision-Based Control Systems
Future trends in vision-based control systems emphasize the integration of advanced visual servoing techniques with fixed camera setups to enhance precision and adaptability in dynamic environments. Innovations in machine learning and real-time image processing are driving improvements in robustness and speed, enabling more accurate object tracking and manipulation. The fusion of 3D vision and multi-camera networks promises significant advancements in autonomous robotics, industrial automation, and intelligent surveillance applications.
Visual servoing vs Fixed camera Infographic