ROS 2 offers significant improvements over ROS 1, including enhanced real-time capabilities, support for multiple platforms, and better security features, making it more suitable for modern robotic applications. Your choice between ROS 1 and ROS 2 should consider the specific requirements of your project, such as system complexity, scalability, and long-term support.
Table of Comparison
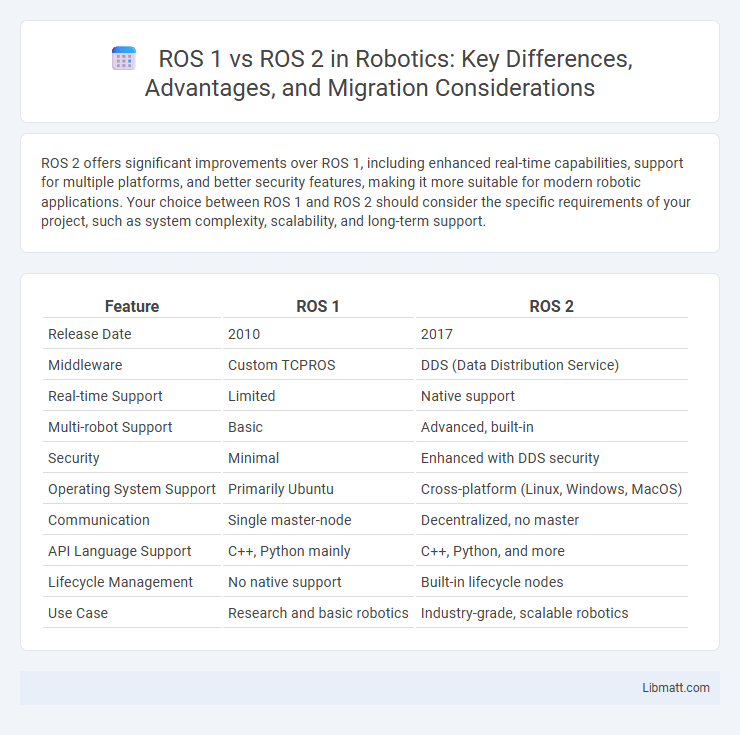
| Feature | ROS 1 | ROS 2 |
|---|---|---|
| Release Date | 2010 | 2017 |
| Middleware | Custom TCPROS | DDS (Data Distribution Service) |
| Real-time Support | Limited | Native support |
| Multi-robot Support | Basic | Advanced, built-in |
| Security | Minimal | Enhanced with DDS security |
| Operating System Support | Primarily Ubuntu | Cross-platform (Linux, Windows, MacOS) |
| Communication | Single master-node | Decentralized, no master |
| API Language Support | C++, Python mainly | C++, Python, and more |
| Lifecycle Management | No native support | Built-in lifecycle nodes |
| Use Case | Research and basic robotics | Industry-grade, scalable robotics |
Introduction to ROS 1 and ROS 2
ROS 1, introduced in 2010, is an open-source robotics middleware providing tools and libraries for robot software development. ROS 2, launched in 2017, enhances ROS 1 by offering improved real-time capabilities, security, and support for multi-robot systems. Your robotics projects benefit from ROS 2's modern architecture, which addresses the limitations found in ROS 1.
Key Architectural Differences
ROS 1 relies on a single master node for communication, which can create bottlenecks and limit scalability, while ROS 2 uses a decentralized architecture based on the Data Distribution Service (DDS) for enhanced flexibility and reliability. ROS 2 introduces real-time capabilities, improved security features, and native support for multiple platforms, addressing the limitations of ROS 1. Understanding these key architectural differences helps you choose the right ROS version for complex robotic applications requiring robustness and scalability.
Communication Mechanisms and Middleware
ROS 1 uses a custom communication layer primarily based on ROS Master for node registration and message passing, relying on TCPROS and UDPROS protocols for data transport. ROS 2 introduces DDS (Data Distribution Service) middleware, enabling decentralized, real-time, and more reliable communication with built-in Quality of Service (QoS) policies. This shift allows ROS 2 to support diverse networking environments, improved scalability, and stronger support for multi-robot systems compared to ROS 1's centralized architecture.
Performance and Scalability
ROS 2 significantly enhances performance and scalability compared to ROS 1 by leveraging a DDS-based middleware, enabling real-time communication and improved network efficiency. It supports multi-robot systems and distributed computing more effectively, allowing your robotic applications to scale seamlessly across complex environments. ROS 2's architecture optimizes resource management, resulting in reduced latency and higher throughput critical for demanding robotics tasks.
Security Features Comparison
ROS 2 offers significantly enhanced security features compared to ROS 1, including built-in support for DDS security plugins, allowing for authentication, encryption, and access control at the middleware level. ROS 1 lacks native security mechanisms, making it vulnerable to unauthorized access and data interception, requiring external tools for secure communication. Your choice of ROS version impacts the robustness of security protocols available for protecting robotic system data and communications.
Real-Time Capabilities
ROS 2 significantly improves real-time capabilities compared to ROS 1 by leveraging a real-time communication layer based on DDS (Data Distribution Service), which enables deterministic message delivery and lower latency. ROS 1 lacks native real-time support due to its reliance on non-deterministic communication mechanisms like TCPROS and UDPROS. Real-time performance in ROS 2 is critical for applications such as autonomous vehicles and robotics requiring precise timing and synchronization.
Ecosystem and Community Support
ROS 1 boasts a mature ecosystem with extensive libraries, tools, and a large, active community that provides abundant resources, tutorials, and third-party integrations, making it highly accessible for developers. In contrast, ROS 2 is rapidly growing its ecosystem with an emphasis on modern middleware, real-time capabilities, and enhanced security, attracting a growing community that supports new industrial and commercial applications. Community support for ROS 1 remains robust due to its longevity, while ROS 2's evolving ecosystem benefits from increasing contributions driven by cutting-edge technology adoption and industry partnerships.
Migration and Compatibility Challenges
Migrating from ROS 1 to ROS 2 involves addressing significant compatibility challenges due to distinct middleware architectures, communication protocols, and API changes. Your existing ROS 1 packages often require substantial refactoring or complete rewrites to function correctly within the ROS 2 ecosystem, which prioritizes real-time capabilities and security enhancements. Tools like ros1_bridge facilitate interoperability between ROS 1 and ROS 2 nodes, but seamless migration demands careful planning and testing to ensure system stability.
Use Cases and Industry Adoption
ROS 1 remains widely used for academic research, prototyping, and legacy systems due to its stability and extensive package ecosystem. ROS 2 has gained traction in industrial automation, automotive, and aerospace sectors, offering enhanced real-time performance, security features, and support for multi-robot systems. Major companies like Toyota, Bosch, and Open Robotics are driving ROS 2 adoption for production-grade, safety-critical applications that demand scalability and robust communication.
Future Prospects and Roadmap
ROS 2 offers significant improvements over ROS 1 with a robust roadmap focused on real-time capabilities, enhanced security, and scalability for complex robotic systems. Its modular architecture and active community support ensure continuous updates aligning with emerging technologies such as AI integration and edge computing. Your investment in ROS 2 ensures access to future-proof tools and long-term support critical for advanced robotics development.
ROS 1 vs ROS 2 Infographic