Time-of-Flight sensors measure distance by calculating the time it takes for a light pulse to travel to an object and back, offering precise depth information for applications like smartphones and robotics. LIDAR systems use similar principles but typically scan large areas with laser beams, providing high-resolution 3D mapping essential for autonomous vehicles and environmental monitoring.
Table of Comparison
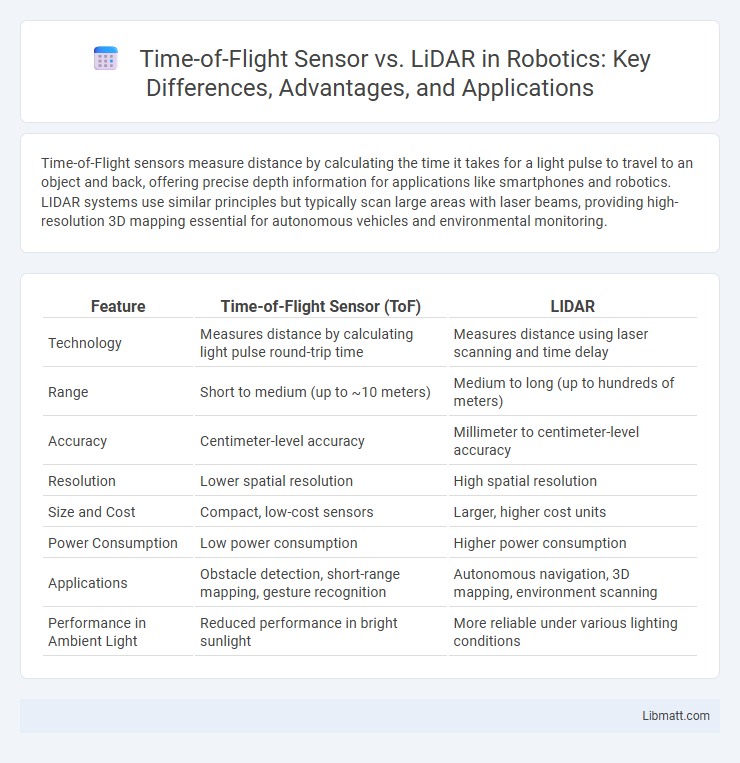
| Feature | Time-of-Flight Sensor (ToF) | LIDAR |
|---|---|---|
| Technology | Measures distance by calculating light pulse round-trip time | Measures distance using laser scanning and time delay |
| Range | Short to medium (up to ~10 meters) | Medium to long (up to hundreds of meters) |
| Accuracy | Centimeter-level accuracy | Millimeter to centimeter-level accuracy |
| Resolution | Lower spatial resolution | High spatial resolution |
| Size and Cost | Compact, low-cost sensors | Larger, higher cost units |
| Power Consumption | Low power consumption | Higher power consumption |
| Applications | Obstacle detection, short-range mapping, gesture recognition | Autonomous navigation, 3D mapping, environment scanning |
| Performance in Ambient Light | Reduced performance in bright sunlight | More reliable under various lighting conditions |
Introduction to Time-of-Flight Sensors and LIDAR
Time-of-Flight (ToF) sensors measure distance by calculating the time taken for emitted light pulses to reflect back from objects, enabling precise depth mapping in compact devices. LIDAR (Light Detection and Ranging) systems utilize laser pulses to generate high-resolution 3D models and accurate spatial data over longer ranges, commonly used in autonomous vehicles and topographic mapping. Both technologies rely on light-based distance measurement, but ToF sensors prioritize miniaturization and cost-effectiveness, whereas LIDAR emphasizes range and detailed environmental scanning.
Working Principles: Time-of-Flight vs. LIDAR
Time-of-Flight (ToF) sensors measure distance by emitting a light pulse and calculating the time it takes for the reflection to return, enabling rapid depth mapping with high precision. LIDAR operates using laser beams that scan the environment point-by-point, constructing detailed 3D maps by measuring the travel time of laser pulses with ultra-high accuracy. Both technologies rely on light's travel time, but ToF sensors typically offer faster, lower-resolution depth sensing, while LIDAR provides highly accurate, high-resolution spatial data suited for complex environments.
Key Differences Between ToF Sensors and LIDAR
Time-of-Flight (ToF) sensors measure distance by calculating the time light takes to travel to an object and back, typically providing quick, short-range depth data with lower resolution compared to LIDAR. LIDAR systems emit laser pulses over a wider area, generating high-resolution 3D maps ideal for long-range applications such as autonomous vehicles and environmental scanning. Your choice between ToF and LIDAR depends on the required accuracy, range, and application complexity, with ToF offering cost-effective proximity sensing and LIDAR delivering detailed spatial awareness.
Accuracy and Resolution Comparison
Time-of-Flight (ToF) sensors generally offer lower spatial resolution and accuracy compared to LIDAR systems, as they measure distance by calculating the time taken for light to reflect off surfaces, resulting in coarser depth maps. LIDAR provides higher accuracy and resolution by emitting laser pulses with precise scanning capabilities, enabling detailed 3D mapping and object detection at longer ranges. The superior precision of LIDAR makes it the preferred choice for applications requiring fine detail and reliable distance measurements, such as autonomous vehicles and advanced robotics.
Range and Field of View Analysis
Time-of-Flight (ToF) sensors typically offer shorter range capabilities, generally up to a few meters, making them suitable for close-range applications, while LIDAR systems achieve significantly longer ranges exceeding hundreds of meters, ideal for detailed environmental mapping. The field of view (FOV) for ToF sensors is often wider but less precise, enabling broad area detection, whereas LIDAR provides a narrower, highly accurate FOV through laser scanning techniques, enhancing depth resolution. Your choice between ToF and LIDAR should consider the trade-off between ToF's wide FOV for proximity sensing and LIDAR's extended range with fine spatial accuracy for large-scale terrain analysis.
Application Areas: ToF Sensors vs. LIDAR
Time-of-Flight (ToF) sensors excel in short-range applications such as gesture recognition, smartphone cameras, and indoor navigation, providing precise depth information with low power consumption. LIDAR technology is preferred for long-range, high-resolution mapping and autonomous vehicles, offering detailed 3D environmental scanning crucial for accurate object detection and terrain mapping. Your choice between ToF sensors and LIDAR depends on the required range, resolution, and application environment.
Cost and Scalability Factors
Time-of-Flight (ToF) sensors typically offer lower cost and easier scalability compared to LIDAR systems, making them suitable for mass-market applications. LIDAR provides higher accuracy and range but comes with increased production costs and more complex integration challenges, limiting its scalability for cost-sensitive projects. The ongoing advancements in semiconductor technology are gradually reducing ToF sensor costs, enhancing their feasibility in consumer electronics and automotive sectors.
Environmental and Performance Considerations
Time-of-Flight sensors excel in short-range applications with low power consumption and reliable performance in indoor environments, but can struggle with direct sunlight and highly reflective surfaces. LIDAR systems offer superior accuracy and longer detection ranges in diverse outdoor conditions, handling varying light and weather scenarios effectively, though they require more power and processing capacity. Environmental factors such as ambient light, rain, fog, and surface reflectivity significantly influence sensor choice, with LIDAR being preferred for robust outdoor mapping and autonomous navigation, while ToF sensors are optimal for compact, low-energy indoor use.
Integration Challenges and Solutions
Time-of-Flight (ToF) sensors and LIDAR systems present distinct integration challenges, primarily due to differences in size, power consumption, and data processing requirements. ToF sensors, being more compact and energy-efficient, are easier to integrate into consumer electronics but may face limitations in range and accuracy compared to LIDAR, which demands advanced calibration and processing algorithms for precise 3D mapping. Your choice depends on balancing these factors, with solutions like sensor fusion and specialized software frameworks enhancing integration performance and reliability for applications from robotics to autonomous vehicles.
Future Trends and Innovations in 3D Sensing
Time-of-Flight (ToF) sensors and LIDAR systems are rapidly evolving with the integration of AI-driven algorithms and miniaturized hardware to boost accuracy and speed in 3D sensing applications. Emerging trends include hybrid sensors combining ToF and LIDAR technologies, enabling enhanced depth perception and environmental mapping for autonomous vehicles and augmented reality devices. Innovations in semiconductor materials and photonic integration are set to reduce power consumption and cost, making 3D sensing more accessible for consumer electronics and industrial automation.
Time-of-Flight Sensor vs LIDAR Infographic