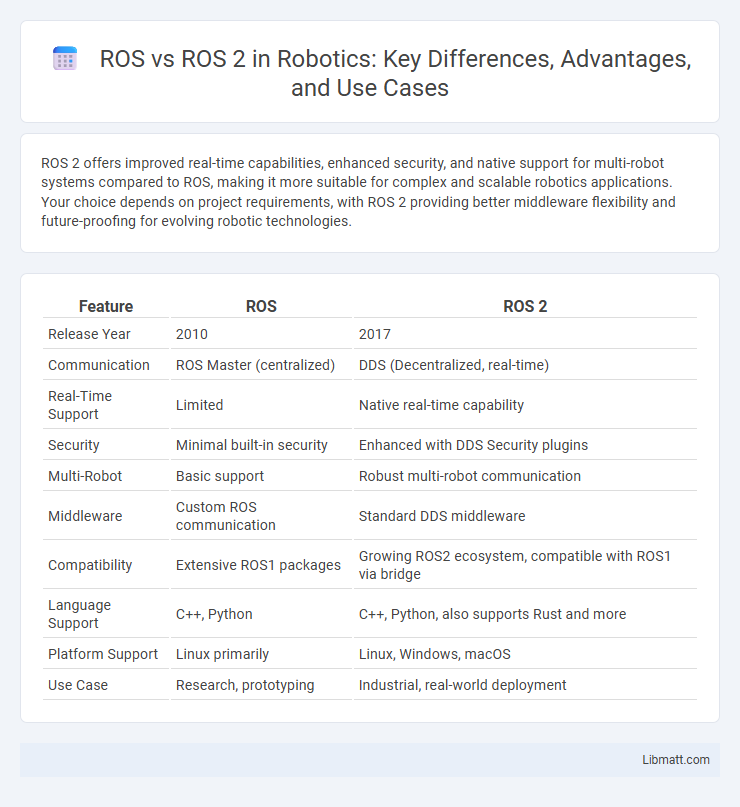
ROS 2 offers improved real-time capabilities, enhanced security, and native support for multi-robot systems compared to ROS, making it more suitable for complex and scalable robotics applications. Your choice depends on project requirements, with ROS 2 providing better middleware flexibility and future-proofing for evolving robotic technologies.
Table of Comparison
| Feature | ROS | ROS 2 |
|---|---|---|
| Release Year | 2010 | 2017 |
| Communication | ROS Master (centralized) | DDS (Decentralized, real-time) |
| Real-Time Support | Limited | Native real-time capability |
| Security | Minimal built-in security | Enhanced with DDS Security plugins |
| Multi-Robot | Basic support | Robust multi-robot communication |
| Middleware | Custom ROS communication | Standard DDS middleware |
| Compatibility | Extensive ROS1 packages | Growing ROS2 ecosystem, compatible with ROS1 via bridge |
| Language Support | C++, Python | C++, Python, also supports Rust and more |
| Platform Support | Linux primarily | Linux, Windows, macOS |
| Use Case | Research, prototyping | Industrial, real-world deployment |
Introduction to ROS and ROS 2
ROS (Robot Operating System) is an open-source framework designed to simplify robot software development, offering a collection of tools, libraries, and conventions for building complex robotic applications. ROS 2 improves upon ROS by addressing limitations such as real-time performance, multi-robot communication, and enhanced security, using a DDS-based middleware for more robust and scalable deployments. Your choice between ROS and ROS 2 depends on the need for advanced features like real-time capabilities and modern communication standards in robotic systems.
Key Differences Between ROS and ROS 2
ROS 2 introduces critical improvements over ROS, including enhanced real-time capabilities, improved security features, and native support for multi-robot systems. Unlike ROS 1's single-threaded design, ROS 2 employs a DDS-based communication layer enabling more flexible, scalable, and reliable message passing. These key differences make ROS 2 better suited for production environments requiring robustness, modularity, and industry-grade performance.
Architecture Comparison: ROS vs ROS 2
ROS features a single-master architecture that relies on a centralized node for communication, which can limit scalability and fault tolerance. ROS 2 adopts a decentralized, peer-to-peer architecture using DDS (Data Distribution Service) for real-time, reliable messaging, enhancing performance and robustness in complex robotic systems. Your choice between ROS and ROS 2 impacts system flexibility, with ROS 2 providing improved modularity and support for multi-robot communication.
Communication Mechanisms in ROS and ROS 2
ROS relies heavily on a topic-based publish/subscribe communication model supported by message passing through roscore and ROS master, which can create single points of failure and limits scalability. ROS 2 introduces DDS (Data Distribution Service) as the underlying middleware, enabling decentralized, real-time, and reliable communication with enhanced quality-of-service (QoS) policies. This architecture provides improved support for multi-robot systems, security features, and better cross-platform compatibility compared to the original ROS communication mechanisms.
Real-Time Capabilities: ROS vs ROS 2
ROS 2 offers enhanced real-time capabilities compared to ROS, leveraging a DDS-based middleware that supports deterministic communication and better quality of service (QoS) settings. Your robotic applications benefit from ROS 2's improved support for multi-threading and real-time operating systems, enabling more predictable and low-latency performance crucial in safety-critical scenarios. Conversely, ROS 1 lacks native real-time support, making it less suitable for applications requiring stringent timing guarantees.
Security Enhancements in ROS 2
ROS 2 introduces significant security enhancements compared to ROS, including built-in support for DDS Security standards such as authentication, encryption, and access control, which ensure secure communication between nodes. Unlike ROS, ROS 2 provides secure lifecycle management and fine-grained access control policies, reducing the risk of unauthorized access and data breaches. These improvements make ROS 2 more suitable for use in industrial, commercial, and safety-critical robotics applications requiring robust security frameworks.
Middleware and DDS Integration
ROS 2 introduces a significant advancement over ROS by integrating Data Distribution Service (DDS) as its middleware, enabling more robust, real-time, and scalable communication. The DDS-based middleware in ROS 2 supports diverse Quality of Service (QoS) settings, which enhances reliability and flexibility for distributed robotic systems. Your robotics applications benefit from improved interoperability and performance due to this seamless DDS integration, making ROS 2 the preferred choice for complex and mission-critical tasks.
Migration Challenges from ROS to ROS 2
Migrating from ROS to ROS 2 presents challenges such as differences in middleware architecture, requiring adaptation to DDS (Data Distribution Service) for improved communication and scalability. You must address changes in node composition, security features, and real-time capabilities that are not backward compatible with ROS 1. Careful planning and thorough understanding of ROS 2's updated tools, APIs, and system requirements are essential to overcome integration issues and ensure a smooth transition.
Community Support and Development
ROS (Robot Operating System) benefits from a large, established community with extensive third-party packages and long-term development experience, facilitating troubleshooting and collaboration. ROS 2, while newer, has rapidly grown its community with enhanced support for modern robotics needs including real-time capabilities, security, and multi-robot systems, attracting contributors focused on advanced applications. The active development of ROS 2 emphasizes modularity and performance improvements, positioning it as the future standard supported by major robotics companies and research institutions.
Choosing Between ROS and ROS 2: Use Cases and Recommendations
ROS is ideal for academic research and prototyping where stability and extensive package support are critical, while ROS 2 excels in industrial applications requiring real-time performance, security, and multi-robot communication. ROS 2's DDS-based middleware enables better scalability and interoperability in complex systems involving autonomous vehicles and robotic arms. For projects emphasizing future-proofing and production readiness, ROS 2 is the recommended choice due to its enhanced architecture and active development.
ROS vs ROS 2 Infographic