Real-Time Operating Systems (RTOS) prioritize predictable response times and deterministic task scheduling, making them essential for applications requiring strict timing constraints like embedded systems and industrial controls. Standard operating systems focus on maximizing throughput and user interaction, providing a versatile environment ideal for general computing but lacking the guaranteed timing precision of an RTOS.
Table of Comparison
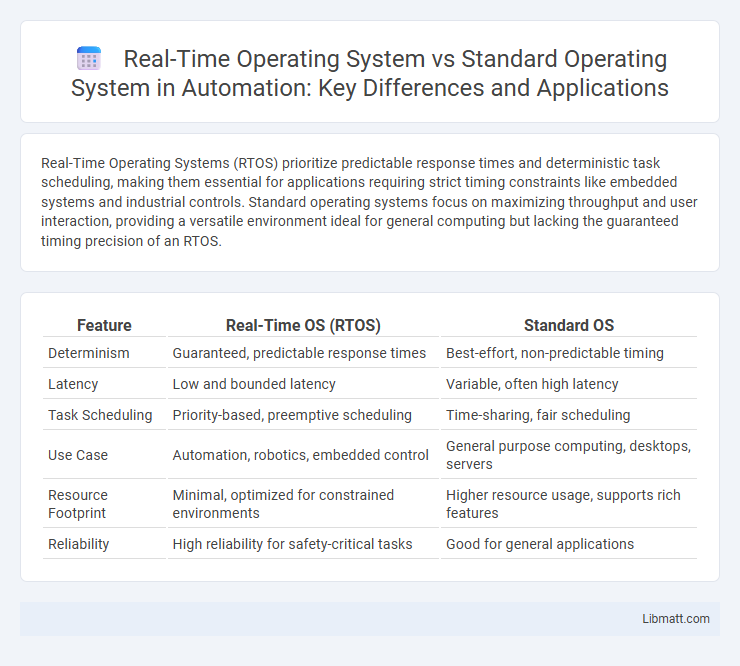
| Feature | Real-Time OS (RTOS) | Standard OS |
|---|---|---|
| Determinism | Guaranteed, predictable response times | Best-effort, non-predictable timing |
| Latency | Low and bounded latency | Variable, often high latency |
| Task Scheduling | Priority-based, preemptive scheduling | Time-sharing, fair scheduling |
| Use Case | Automation, robotics, embedded control | General purpose computing, desktops, servers |
| Resource Footprint | Minimal, optimized for constrained environments | Higher resource usage, supports rich features |
| Reliability | High reliability for safety-critical tasks | Good for general applications |
Introduction to Real-Time OS and Standard OS
Real-Time Operating Systems (RTOS) are designed to process data and events within strict timing constraints, ensuring predictable and deterministic response times critical in embedded systems, industrial automation, and aerospace applications. Standard Operating Systems (Standard OS), such as Windows, macOS, and Linux, prioritize user experience and multitasking flexibility but lack guaranteed timing predictability, making them unsuitable for time-sensitive tasks. The RTOS architecture emphasizes minimal latency and prioritization of real-time processes, while Standard OS focuses on maximizing throughput and resource management for general-purpose computing.
Key Differences Between Real-Time and Standard Operating Systems
Real-Time Operating Systems (RTOS) prioritize deterministic response times with strict timing constraints, ensuring your applications meet deadlines essential for embedded systems or industrial control. Standard Operating Systems (OS) focus on maximizing throughput and user experience, supporting multitasking in environments like desktops or servers without guaranteed task completion times. Key differences include scheduling methods--preemptive priority-based in RTOS versus time-sharing in standard OS--and system predictability versus flexibility.
Types of Real-Time Operating Systems
Real-Time Operating Systems (RTOS) are categorized into hard, soft, and firm real-time systems, each defined by the strictness of deadline adherence. Hard RTOS guarantee task completion within precise time constraints, essential for critical applications like aerospace and medical devices. Soft RTOS offer more flexibility by tolerating occasional deadline misses, suitable for multimedia and telecommunications, while firm RTOS fall in between, where missed deadlines degrade system performance but do not cause complete failure.
Core Features of Standard Operating Systems
Standard operating systems prioritize user friendliness, multitasking, and resource management, supporting complex applications and varied hardware environments. Core features include virtual memory, file system support, graphical user interfaces, security protocols, and broad device driver compatibility. These systems optimize throughput and responsiveness for general-purpose computing rather than guaranteeing strict timing constraints.
Real-Time OS: Determinism and Response Time
Real-Time Operating Systems (RTOS) guarantee deterministic behavior by ensuring that critical tasks meet strict timing constraints with predictable response times, unlike standard OS which prioritize throughput over timing precision. RTOS use priority-based scheduling and minimal latency techniques to manage high-priority interrupts and task execution, ensuring timely completion of real-time processes essential for embedded systems and industrial automation. Your applications demanding consistent and fast response times benefit significantly from RTOS's ability to provide reliable deadline adherence and reduced jitter.
Resource Management in Real-Time vs Standard OS
Real-Time Operating Systems (RTOS) manage resources with deterministic scheduling to ensure timely and predictable task execution, essential for critical applications. Standard Operating Systems use non-deterministic, priority-based or fairness-driven resource allocation, which can lead to variable response times. Your applications requiring consistent timing benefit from the predictable resource management of an RTOS over standard OS resource handling.
Use Cases and Applications for Real-Time OS
Real-Time Operating Systems (RTOS) are essential in applications requiring precise timing and predictable response, such as industrial automation, robotics, and automotive systems where delayed responses could lead to failures or safety hazards. Unlike standard operating systems that prioritize throughput and user experience, RTOS guarantees task completion within strict deadlines, making it ideal for embedded systems, medical devices, and aerospace controls. This deterministic behavior enables critical systems to function reliably in environments where timing constraints are non-negotiable.
Standard OS: Strengths and Limitations
Standard Operating Systems excel in multitasking, user-friendly interfaces, and wide application support, making them ideal for general-purpose computing. Their design prioritizes throughput and resource sharing over strict timing guarantees, which limits their effectiveness in time-critical applications. Your choice should consider that standard OSs may introduce latency and variability unsuitable for real-time responsiveness.
Performance, Reliability, and Scalability Comparison
Real-Time Operating Systems (RTOS) prioritize deterministic performance with low-latency task scheduling to ensure timely and predictable responses critical in embedded systems, whereas Standard Operating Systems (OS) optimize for throughput and multitasking flexibility but may have variable latency. RTOS offer higher reliability in mission-critical applications due to priority-based preemption and minimal context switching, while Standard OS may face bottlenecks under heavy I/O loads or process contention. Scalability in RTOS is often constrained by hardware-specific designs targeting real-time applications, whereas Standard OS support a broader range of hardware configurations and user environments, making them more versatile for general-purpose computing.
Choosing the Right OS: Factors to Consider
Choosing the right OS depends on your application's timing requirements, where Real-Time OS (RTOS) offers deterministic processing with low latency, crucial for time-sensitive tasks like industrial control or medical devices. Standard OS provides a richer user experience with multitasking and broader hardware compatibility, suitable for general-purpose computing and multimedia applications. Evaluating factors such as response time, reliability, resource constraints, and hardware architecture helps determine whether an RTOS or Standard OS best meets your project needs.
Real-Time OS vs Standard OS Infographic