Holonomic robots can move freely in any direction due to their ability to control all degrees of freedom independently, making them ideal for complex navigation tasks. Non-holonomic robots have motion constraints limiting their movement patterns, requiring specialized control strategies to navigate efficiently in your environment.
Table of Comparison
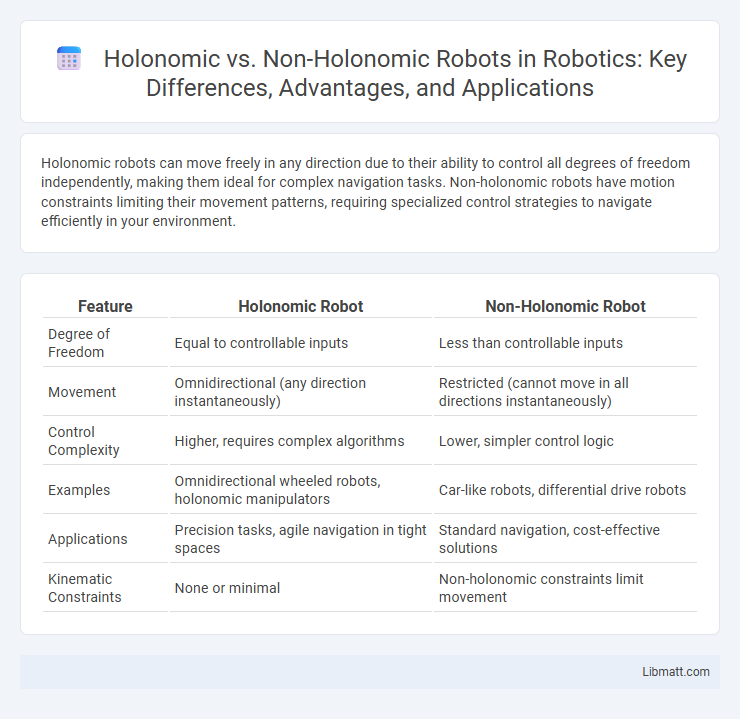
| Feature | Holonomic Robot | Non-Holonomic Robot |
|---|---|---|
| Degree of Freedom | Equal to controllable inputs | Less than controllable inputs |
| Movement | Omnidirectional (any direction instantaneously) | Restricted (cannot move in all directions instantaneously) |
| Control Complexity | Higher, requires complex algorithms | Lower, simpler control logic |
| Examples | Omnidirectional wheeled robots, holonomic manipulators | Car-like robots, differential drive robots |
| Applications | Precision tasks, agile navigation in tight spaces | Standard navigation, cost-effective solutions |
| Kinematic Constraints | None or minimal | Non-holonomic constraints limit movement |
Introduction to Holonomic and Non-Holonomic Robots
Holonomic robots have as many controllable degrees of freedom as their total degrees of freedom, allowing movement in any direction independently, such as omnidirectional wheels. Non-holonomic robots are constrained by kinematic restrictions, limiting their motion to paths defined by their current position and orientation, like wheeled robots that cannot move sideways. Understanding these differences helps you choose the appropriate robot type for tasks requiring precise maneuverability or simplified control dynamics.
Defining Holonomicity in Robotics
Holonomicity in robotics refers to the ability of a robot to move instantaneously in any direction within its configuration space, implying its degrees of freedom match its controllable velocity inputs. Holonomic robots, such as omnidirectional mobile platforms, possess integrable constraints allowing full maneuverability without orientation restrictions, whereas non-holonomic robots, like traditional wheeled vehicles, face non-integrable velocity constraints limiting their instantaneous movements. Understanding these distinctions is critical for designing control algorithms that optimize your robot's navigation efficiency and task execution.
Types of Mobility Constraints
Holonomic robots have mobility constraints that allow motion in any direction on their plane, with the number of controllable degrees of freedom equal to their total degrees of freedom. Non-holonomic robots, such as wheeled vehicles, face non-integrable constraints limiting their movement, often restricting them to forward and backward motions with turning capabilities but no lateral sliding. Understanding these differing mobility constraints is crucial for optimizing Your robot's path planning and control strategies in dynamic environments.
Key Differences Between Holonomic and Non-Holonomic Robots
Holonomic robots have the ability to move freely in any direction due to their extra degrees of freedom, while non-holonomic robots face constraints on their movement, typically limited by wheel configurations and kinematic restrictions. The key difference lies in mobility; holonomic robots can move laterally without changing orientation, whereas non-holonomic robots must follow paths dictated by their steering mechanisms, such as differential drive or car-like steering. Understanding these distinctions helps you select the appropriate robot type for specific tasks requiring agility or constrained navigation.
Examples of Holonomic Robots
Holonomic robots, characterized by their ability to move instantaneously in any direction, include examples such as omnidirectional wheeled robots and drone quadcopters. These robots utilize mechanisms like Mecanum wheels or omni-wheels, enabling precise and agile movement in environments demanding high maneuverability. In contrast, non-holonomic robots, such as standard wheeled mobile robots or car-like robots, have constraints limiting their instantaneous motion to specific directions.
Examples of Non-Holonomic Robots
Non-holonomic robots include common examples such as wheeled mobile robots like differential drive robots, car-like robots, and unicycles, which have constraints on their movement directions due to wheel configurations. These robots cannot move directly sideways and must follow specific paths dictated by their non-integrable constraints. Such limitations differentiate them from holonomic robots, which can move freely in all directions without such restrictions.
Mathematical Representation of Constraints
Holonomic robots have kinematic constraints represented by integrable equations, allowing their position and orientation to be controlled independently through holonomic constraints expressed as equality equations involving their configuration variables. Non-holonomic robots possess non-integrable constraints typically expressed as non-holonomic differential equations that limit feasible instantaneous motions but do not reduce the dimension of the configuration space. Your choice between holonomic and non-holonomic robots influences the complexity of motion planning and control due to these fundamentally different mathematical constraint representations.
Applications in Real-World Scenarios
Holonomic robots, capable of moving in any direction with three degrees of freedom, excel in applications like automated warehouses, where precise and flexible navigation is critical for efficiently managing inventory. Non-holonomic robots, constrained by their motion limitations, are widely used in autonomous vehicles and delivery robots, where path planning optimizes travel along fixed wheels and turning arcs. Industries such as manufacturing, logistics, and agriculture leverage these movement capabilities to enhance productivity and operational efficiency in complex environments.
Challenges in Control and Navigation
Holonomic robots, capable of moving freely in any direction, face fewer constraints in path planning and maneuvering but require complex control algorithms to manage their multidirectional capabilities. Non-holonomic robots are limited by constraints such as non-slipping wheels, making navigation and precise control more challenging, especially in tight or dynamic environments. Effective control of non-holonomic robots often relies on advanced kinematic models and feedback systems to compensate for these motion restrictions during trajectory planning and obstacle avoidance.
Future Trends in Robotic Mobility
Future trends in robotic mobility emphasize the advancement of holonomic robots, which offer omnidirectional movement and enhanced maneuverability in complex environments, making them ideal for dynamic industrial and service applications. Non-holonomic robots, constrained by their motion limitations, are benefiting from improved path-planning algorithms and sensor integration to optimize efficiency and navigation in constrained spaces. Innovations in AI-driven control systems and sensor fusion are accelerating the convergence of both holonomic and non-holonomic platforms, aiming to maximize adaptability and precision in autonomous robotic mobility.
Holonomic vs Non-Holonomic Robot Infographic