ROS offers a mature and widely supported robotics framework ideal for research and simulation, while ROS2 provides enhanced real-time capabilities, improved security, and better support for multi-robot systems, making it suitable for production environments. Choosing between ROS and ROS2 depends on your project's requirements for scalability, performance, and modern middleware integration.
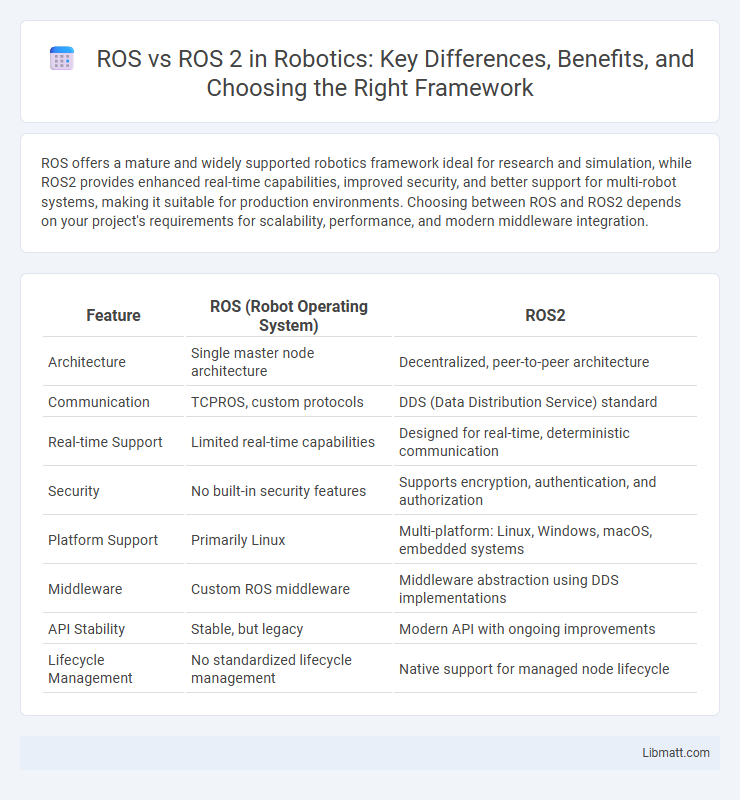
Table of Comparison
| Feature | ROS (Robot Operating System) | ROS2 |
|---|---|---|
| Architecture | Single master node architecture | Decentralized, peer-to-peer architecture |
| Communication | TCPROS, custom protocols | DDS (Data Distribution Service) standard |
| Real-time Support | Limited real-time capabilities | Designed for real-time, deterministic communication |
| Security | No built-in security features | Supports encryption, authentication, and authorization |
| Platform Support | Primarily Linux | Multi-platform: Linux, Windows, macOS, embedded systems |
| Middleware | Custom ROS middleware | Middleware abstraction using DDS implementations |
| API Stability | Stable, but legacy | Modern API with ongoing improvements |
| Lifecycle Management | No standardized lifecycle management | Native support for managed node lifecycle |
Introduction to ROS and ROS2
ROS (Robot Operating System) is a flexible framework for writing robot software, providing tools, libraries, and conventions to simplify the task of creating complex and robust robot behavior. ROS2, the successor to ROS, offers improved communication middleware, real-time capabilities, and enhanced security features designed to support industrial and commercial robot applications. Both ROS and ROS2 facilitate modular software development but ROS2 introduces DDS (Data Distribution Service) for more reliable and scalable inter-process communication.
Key Differences Between ROS and ROS2
ROS2 features improved real-time capabilities, enhanced security measures, and native support for multi-robot systems, addressing limitations present in ROS. The middleware of ROS2 switches to Data Distribution Service (DDS), enabling better communication performance and scalability compared to ROS's custom communication layer. Furthermore, ROS2 introduces a flexible node lifecycle management system and supports multiple platforms, including Windows and embedded systems, expanding beyond ROS's Linux-centric environment.
Architecture Comparison: ROS vs ROS2
ROS features a single-threaded architecture with a master node responsible for communication management, which can lead to bottlenecks and single points of failure. ROS2 introduces a decentralized, multi-threaded architecture based on the Data Distribution Service (DDS) middleware, enhancing real-time capabilities, scalability, and fault tolerance. Your choice between ROS and ROS2 should consider the improved architecture of ROS2 for complex, distributed robotic systems requiring robust communication and reliability.
Communication Mechanisms and Middleware
ROS primarily relies on a custom communication system built around TCPROS and UDPROS protocols, which use TCP and UDP transport layers for message passing but lack real-time capabilities and standardized middleware integration. ROS2 introduces DDS (Data Distribution Service) as its default middleware, offering improved real-time performance, enhanced scalability, and robust Quality of Service (QoS) settings for reliable, flexible communication across distributed robotic systems. This shift to DDS enables ROS2 to support diverse network topologies and heterogeneous platforms, addressing the limitations of ROS's original communication mechanisms.
Real-Time Capabilities and Performance
ROS2 offers enhanced real-time capabilities and improved performance compared to ROS, leveraging DDS middleware for deterministic communication and better support for multi-threading. Its modular architecture enables lower latency and more reliable execution critical for real-time robotic applications. You can achieve more precise control and faster response times with ROS2, making it ideal for advanced robotic systems requiring high real-time performance.
Security Features in ROS and ROS2
ROS2 offers significantly enhanced security features compared to ROS, including built-in support for Data Distribution Service (DDS) security plugins that provide authentication, encryption, and access control, ensuring secure communication between nodes. ROS lacks native security mechanisms, making it vulnerable to unauthorized access and data interception, thus requiring external tools or custom implementations to safeguard your robotic system. With ROS2, your applications benefit from a standardized security framework that supports fine-grained permissions and secure lifecycle management, addressing modern cybersecurity demands in robotics.
Platform and Language Support
ROS supports primarily Ubuntu Linux and ROS1 is mainly programmed in C++ and Python. ROS2 expands platform compatibility, supporting Ubuntu, Windows, and macOS, with programming in C++, Python, and additional language bindings like Rust. Your choice between ROS and ROS2 impacts the range of supported operating systems and languages for your robotic applications.
Migration Challenges: Moving from ROS to ROS2
Migration from ROS to ROS2 involves overcoming challenges such as compatibility issues due to architectural differences, especially in middleware and communication protocols. You must adapt existing ROS nodes to ROS2's DDS-based communication framework and manage changes in APIs and tooling to ensure seamless functionality. Effective migration requires thorough testing and familiarity with ROS2's improved security, real-time capabilities, and enhanced modularity.
Community Support and Ecosystem
ROS boasts a well-established community with extensive forums, tutorials, and a vast repository of open-source packages, facilitating rapid development and knowledge sharing. ROS2 is rapidly growing its ecosystem, supported by enhanced real-time capabilities and cross-platform flexibility, attracting new contributors and industries focused on scalability and security. Both platforms benefit from active contributions, but ROS's mature community offers broader resources, while ROS2 emphasizes future-proofing through modern middleware and diversified hardware support.
Which to Choose: ROS or ROS2 for Your Robotics Project
ROS2 offers enhanced real-time performance, improved security features, and native support for multi-robot systems, making it ideal for advanced robotics projects requiring scalability and robustness. ROS remains widely used due to its extensive package ecosystem and community support, suitable for prototyping and research in simpler applications. Choosing between ROS and ROS2 depends on project requirements for real-time control, security, and future-proofing versus established tools and libraries.
ROS vs ROS2 Infographic