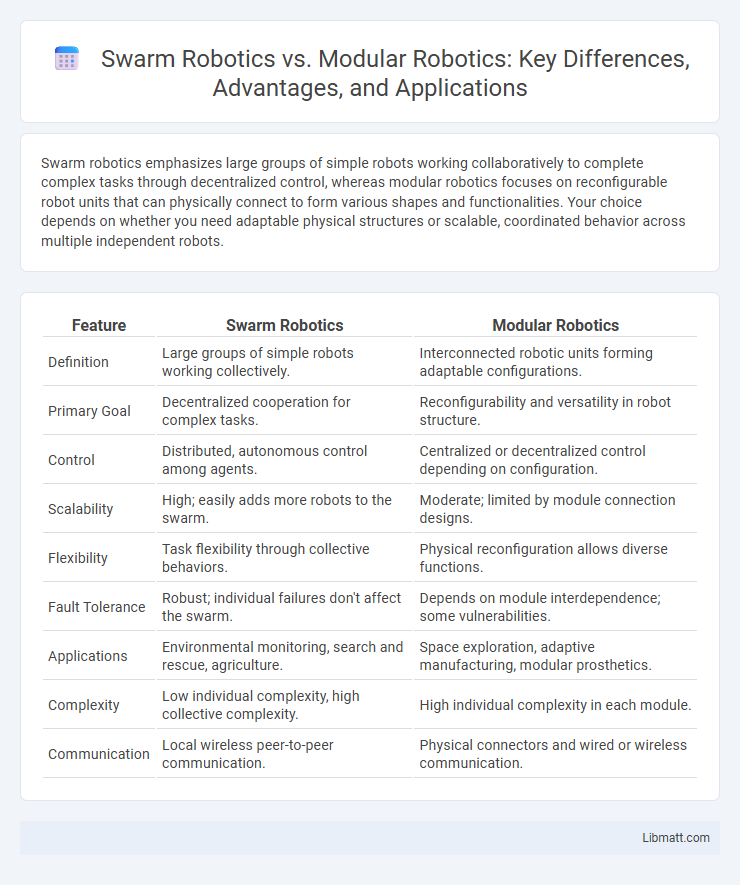
Swarm robotics emphasizes large groups of simple robots working collaboratively to complete complex tasks through decentralized control, whereas modular robotics focuses on reconfigurable robot units that can physically connect to form various shapes and functionalities. Your choice depends on whether you need adaptable physical structures or scalable, coordinated behavior across multiple independent robots.
Table of Comparison
| Feature | Swarm Robotics | Modular Robotics |
|---|---|---|
| Definition | Large groups of simple robots working collectively. | Interconnected robotic units forming adaptable configurations. |
| Primary Goal | Decentralized cooperation for complex tasks. | Reconfigurability and versatility in robot structure. |
| Control | Distributed, autonomous control among agents. | Centralized or decentralized control depending on configuration. |
| Scalability | High; easily adds more robots to the swarm. | Moderate; limited by module connection designs. |
| Flexibility | Task flexibility through collective behaviors. | Physical reconfiguration allows diverse functions. |
| Fault Tolerance | Robust; individual failures don't affect the swarm. | Depends on module interdependence; some vulnerabilities. |
| Applications | Environmental monitoring, search and rescue, agriculture. | Space exploration, adaptive manufacturing, modular prosthetics. |
| Complexity | Low individual complexity, high collective complexity. | High individual complexity in each module. |
| Communication | Local wireless peer-to-peer communication. | Physical connectors and wired or wireless communication. |
Introduction to Swarm and Modular Robotics
Swarm robotics involves large groups of simple robots collaborating to perform complex tasks through decentralized control and collective behavior, inspired by social insects like ants or bees. Modular robotics consists of reconfigurable robotic units that can autonomously assemble into various shapes and structures to adapt to different tasks or environments. Your choice between swarm and modular robotics depends on whether you require scalable cooperation or flexible physical adaptability.
Defining Swarm Robotics
Swarm robotics refers to the coordination of numerous simple robots that work collectively to complete complex tasks through decentralized control and self-organization. This approach emphasizes scalability, robustness, and flexibility, enabling large groups of robots to perform tasks such as exploration, search-and-rescue, and environmental monitoring. Unlike modular robotics, which involves reconfigurable physical units forming a single robot, swarm robotics relies on the interaction of many independent robots to achieve emergent behaviors.
Defining Modular Robotics
Modular robotics involves constructing robotic systems from multiple independent modules that can autonomously reconfigure to perform various tasks, enhancing adaptability and fault tolerance. Each module typically contains actuation, sensing, communication, and computation capabilities, allowing seamless integration and collective behavior unlike traditional monolithic robots. This approach contrasts with swarm robotics, where numerous simple robots coordinate to achieve complex objectives without physical reconfiguration.
Core Principles of Swarm Robotics
Swarm robotics is grounded in the core principles of decentralized control, local communication, and collective behavior inspired by natural systems like insect colonies. Each robot in a swarm operates autonomously with simple rules, enabling robust, scalable, and flexible solutions through emergent behavior without centralized coordination. This contrasts with modular robotics, where systems rely on reconfigurable units with physical interconnections to achieve adaptability and functionality.
Core Principles of Modular Robotics
Core principles of modular robotics revolve around reconfigurability, scalability, and fault tolerance, enabling robots to adapt shape and function through connected modules. Each module functions as an autonomous unit with its own power and control, allowing for collective behavior that supports complex tasks. Your applications benefit from increased versatility and robustness, as modular robots can self-assemble and repair, distinguishing them from swarm robotics which rely on collaboration among simpler, independent agents.
Communication Methods in Swarm vs Modular Systems
Swarm robotics primarily relies on decentralized communication through local interactions such as wireless signals, infrared, or Bluetooth, enabling individual robots to coordinate behaviors based on immediate environmental data. Modular robotics often employs more structured communication methods, including wired connections or dedicated communication protocols, to ensure robust data exchange between connected modules for coordinated movement and task execution. Your choice between these systems depends on whether flexible, adaptive coordination or high-precision, integrated control is more critical for the application.
Scalability and Flexibility Comparison
Swarm robotics excels in scalability by deploying large numbers of simple robots that collaborate to complete complex tasks through decentralized control, enabling easy expansion of the system. Modular robotics offers higher flexibility due to self-reconfigurable units that can change shape and functionality, adapting to various tasks and environments. While swarm systems scale by quantity, modular robots scale in both size and capability, providing distinct advantages depending on application requirements.
Real-World Applications of Swarm Robotics
Swarm robotics excels in real-world applications such as environmental monitoring, disaster response, and agriculture, where large numbers of simple robots collaboratively perform complex tasks like area coverage and data collection. These systems leverage decentralized control and robustness, enabling adaptability in dynamic and unpredictable environments. Compared to modular robotics, which focuses on reconfigurable robotic structures, swarm robotics emphasizes scalability and distributed intelligence for tasks requiring parallelized coordination among numerous agents.
Real-World Applications of Modular Robotics
Modular robotics excels in real-world applications such as disaster response, where reconfigurable robots adapt to navigate debris and confined spaces efficiently. These systems enable rapid deployment and customization for tasks in space exploration, manufacturing, and medical surgery, enhancing flexibility and resilience. Your ability to tailor modular units for specific missions demonstrates their practical superiority in dynamic, unpredictable environments.
Future Trends: Swarm vs Modular Robotics
Future trends in swarm robotics emphasize enhanced scalability and decentralized control, enabling large groups of simple robots to perform complex tasks collectively with improved robustness and adaptability. Modular robotics is advancing towards greater reconfigurability and multifunctionality, allowing individual modules to self-assemble into diverse structures tailored for specific applications in dynamic environments. Integration of AI and machine learning is expected to further optimize coordination in swarm systems and autonomous configuration in modular robots, driving innovation in fields such as search and rescue, space exploration, and automated manufacturing.
Swarm Robotics vs Modular Robotics Infographic