Onboard SLAM processes sensor data directly on the robot, enabling real-time localization and mapping crucial for autonomous navigation in dynamic environments. Offboard SLAM relies on external computing resources, allowing complex data analysis and map building but may introduce latency that affects Your robot's responsiveness.
Table of Comparison
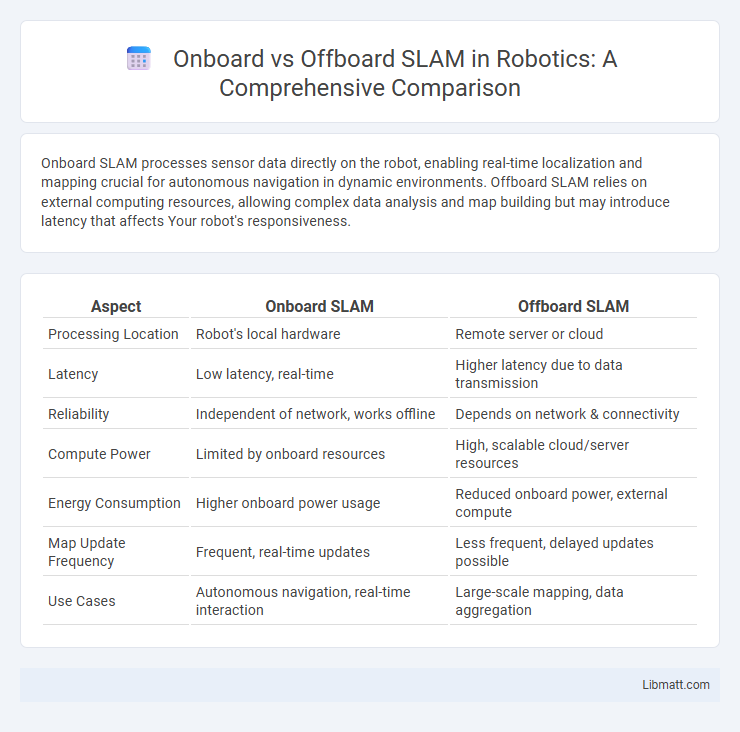
| Aspect | Onboard SLAM | Offboard SLAM |
|---|---|---|
| Processing Location | Robot's local hardware | Remote server or cloud |
| Latency | Low latency, real-time | Higher latency due to data transmission |
| Reliability | Independent of network, works offline | Depends on network & connectivity |
| Compute Power | Limited by onboard resources | High, scalable cloud/server resources |
| Energy Consumption | Higher onboard power usage | Reduced onboard power, external compute |
| Map Update Frequency | Frequent, real-time updates | Less frequent, delayed updates possible |
| Use Cases | Autonomous navigation, real-time interaction | Large-scale mapping, data aggregation |
Introduction to SLAM Technologies
Onboard SLAM processes sensor data directly on the robot or device, enabling real-time mapping and localization without relying on external infrastructure. Offboard SLAM, conversely, sends raw sensor data to a centralized system or cloud for computation, benefiting from higher processing power but introducing latency. Both methods utilize technologies such as LiDAR, cameras, and IMUs to create accurate spatial maps and enable autonomous navigation.
Defining Onboard SLAM
Onboard SLAM refers to Simultaneous Localization and Mapping processes executed directly on a robot's internal hardware, allowing it to build maps and localize itself in real-time without relying on external computational resources. This approach enhances autonomy and responsiveness, crucial for dynamic environments where latency must be minimized. Your autonomous system benefits from reduced dependence on network connectivity and improved operational robustness through Onboard SLAM.
Understanding Offboard SLAM
Offboard SLAM processes sensor data remotely on powerful external servers, enabling complex map building and localization without taxing your device's limited onboard resources. This approach allows higher computational capacity and storage, leading to more accurate and detailed environment mapping suitable for large-scale applications. You benefit from improved real-time updates and scalability, making Offboard SLAM ideal for scenarios requiring extensive data integration and collaborative robot navigation.
Key Differences Between Onboard and Offboard SLAM
Onboard SLAM processes sensor data and generates maps directly on the robot, enabling real-time localization and navigation without relying on external systems. Offboard SLAM, in contrast, sends sensor data to an external computer or server for processing, which can offer higher computational power and more detailed mapping but introduces latency and dependency on communication links. Your choice between onboard and offboard SLAM depends on factors like processing capacity, response time requirements, and operational environment.
Hardware Requirements for Each Approach
Onboard SLAM requires powerful embedded processors and sensors integrated directly into the robot or vehicle, demanding compact hardware with low latency and efficient real-time computation capabilities. Offboard SLAM relies on external computing resources, such as cloud servers or edge devices, reducing onboard hardware complexity but necessitating reliable, high-bandwidth communication links to transmit sensor data. Your choice between onboard and offboard SLAM hardware depends on factors like processing power availability, network reliability, and latency tolerance for the specific application.
Real-Time Processing: Onboard vs Offboard
Onboard SLAM enables real-time processing directly on the robot or device, minimizing latency by handling sensor data locally without dependency on external systems. Offboard SLAM, in contrast, relies on transmitting data to an external server or cloud for processing, which can introduce delays due to communication bandwidth and network reliability. Real-time responsiveness in dynamic environments favors onboard SLAM for immediate decision-making, while offboard SLAM suits applications requiring extensive computational resources or map refinement.
Scalability and Flexibility Considerations
Onboard SLAM offers enhanced scalability by processing data locally on the robot, reducing reliance on external infrastructure and enabling deployment in diverse environments. This architecture provides greater flexibility for real-time navigation in dynamic or remote settings where network connectivity is limited or unstable. Conversely, Offboard SLAM depends on centralized processing resources, which can limit scalability due to bandwidth constraints and introduce latency, though it benefits from more powerful computation and easier hardware updates.
Use Cases in Robotics and Autonomous Systems
Onboard SLAM enables real-time localization and mapping directly on robots, making it ideal for dynamic environments like autonomous drones, warehouse robots, and service robots requiring immediate decision-making capabilities. Offboard SLAM leverages powerful external processors or cloud infrastructure, supporting large-scale or computationally intensive mapping tasks common in fleet management, remote monitoring, and infrastructure inspection with autonomous vehicles. Robotics applications demanding low latency and high autonomy benefit from onboard SLAM, while those requiring extensive data analysis and collaborative multi-robot coordination favor offboard SLAM solutions.
Challenges and Limitations of SLAM Approaches
Onboard SLAM faces challenges such as limited computational resources and power constraints, which can impact real-time processing and accuracy. Offboard SLAM relies on external processing units, introducing latency and potential communication bottlenecks that may hinder responsiveness in dynamic environments. Your choice between onboard and offboard SLAM must consider trade-offs in scalability, latency, and robustness to sensor noise and environmental changes.
Choosing the Right SLAM Solution for Your Application
Onboard SLAM processes sensor data locally on the robot, providing low latency and increased autonomy ideal for real-time navigation in dynamic environments. Offboard SLAM relies on external computing resources, enabling higher processing power and data fusion from multiple sources, which suits applications requiring complex mapping and extensive environment analysis. Your choice depends on factors like computational capacity, latency tolerance, and the complexity of the environment in which the SLAM system must operate.
Onboard SLAM vs Offboard SLAM Infographic