Path planning focuses on finding an optimal route from a starting point to a destination without considering the dynamics or constraints of the robot, while motion planning incorporates both the path and the robot's kinematic and dynamic limitations to generate feasible movements. Your choice between path planning and motion planning depends on whether you need a simple route or a physically executable trajectory for robotic navigation.
Table of Comparison
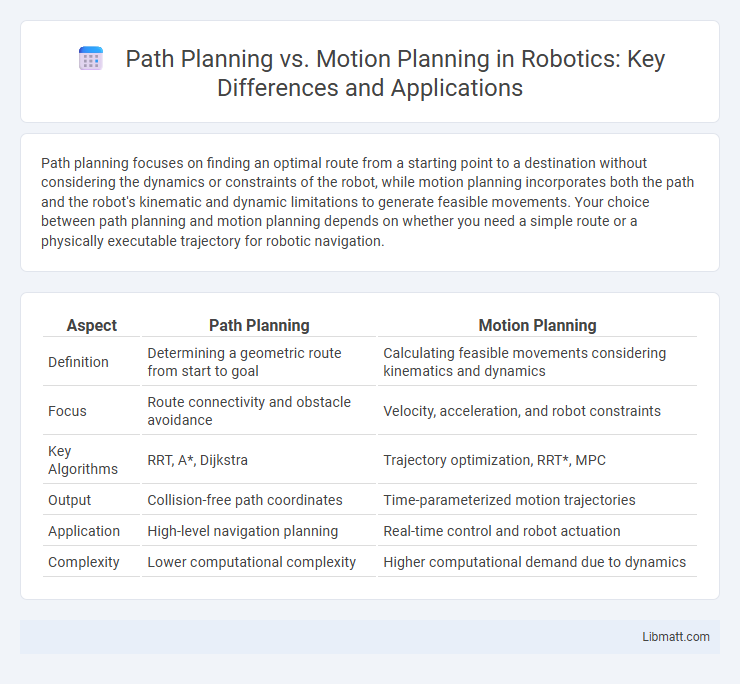
| Aspect | Path Planning | Motion Planning |
|---|---|---|
| Definition | Determining a geometric route from start to goal | Calculating feasible movements considering kinematics and dynamics |
| Focus | Route connectivity and obstacle avoidance | Velocity, acceleration, and robot constraints |
| Key Algorithms | RRT, A*, Dijkstra | Trajectory optimization, RRT*, MPC |
| Output | Collision-free path coordinates | Time-parameterized motion trajectories |
| Application | High-level navigation planning | Real-time control and robot actuation |
| Complexity | Lower computational complexity | Higher computational demand due to dynamics |
Introduction to Path Planning and Motion Planning
Path planning involves determining a collision-free route from a start point to a goal within an environment, focusing on the overall trajectory without considering the robot's dynamics. Motion planning extends this by incorporating the robot's kinematics, dynamics, and constraints to generate feasible, smooth, and executable movements along the path. Understanding the distinction between path planning and motion planning helps optimize your autonomous system's navigation and control performance.
Defining Path Planning
Path planning involves determining an optimal or feasible route between a start and a goal location within a given environment, often represented as a sequence of waypoints or configurations. This process primarily focuses on finding a collision-free path using algorithms such as A*, Dijkstra's, or Rapidly-exploring Random Trees (RRT). Unlike motion planning, path planning emphasizes the geometric or topological aspects of navigation without directly addressing dynamic constraints or control inputs.
Defining Motion Planning
Motion planning refers to the computational process of determining a sequence of valid configurations that a robot or autonomous agent must follow to achieve a specific goal while avoiding obstacles. It involves mapping the environment, calculating feasible trajectories, and ensuring smooth, collision-free movements within dynamic or static settings. Unlike path planning, which focuses solely on the geometric route, motion planning integrates kinematic constraints and temporal aspects to generate executable motion commands.
Key Differences Between Path and Motion Planning
Path planning focuses on finding a collision-free route from start to goal within a given environment, emphasizing spatial feasibility and obstacle avoidance. Motion planning extends beyond path generation by incorporating the robot's kinematic and dynamic constraints to produce executable trajectories ensuring smooth and feasible movement. The primary difference lies in path planning addressing geometric connectivity, while motion planning handles dynamic feasibility and control inputs for real-world robot navigation.
Common Algorithms Used in Path Planning
Common algorithms used in path planning include A*, Dijkstra's algorithm, and Rapidly-exploring Random Trees (RRT). A* is widely preferred for its heuristic-based optimization, enabling efficient shortest path discovery on grids and graphs. Dijkstra's algorithm provides guaranteed shortest paths in weighted graphs, while RRT is effective for exploring high-dimensional spaces in robotic navigation tasks.
Popular Methods for Motion Planning
Sampling-based algorithms such as Rapidly-exploring Random Trees (RRT) and Probabilistic Roadmaps (PRM) dominate popular methods for motion planning due to their efficiency in high-dimensional spaces. These algorithms generate feasible paths by exploring the configuration space without requiring an explicit representation, enabling real-time applications in robotics and autonomous vehicles. You can leverage these techniques to optimize your robot's trajectory while avoiding obstacles and ensuring smooth movement.
Applications of Path Planning
Path planning plays a crucial role in autonomous vehicles, robotics, and drone navigation by determining the optimal route from a starting point to a goal while avoiding obstacles. Its applications extend to warehouse automation, where efficient path planning enhances inventory management and reduces delivery times. Your systems benefit from path planning algorithms that ensure safe, efficient, and collision-free navigation in complex environments.
Applications of Motion Planning
Motion planning is essential in robotics, autonomous vehicles, and drone navigation, enabling systems to determine feasible paths while avoiding obstacles in dynamic environments. It integrates sensor data and real-time adjustments to execute smooth trajectories, critical for robotic manipulators in manufacturing and service industries. Advanced algorithms in motion planning support complex tasks like robot arm coordination and autonomous delivery systems, enhancing efficiency and safety.
Challenges in Path and Motion Planning
Path planning faces challenges such as navigating complex environments with obstacles and finding the most efficient route between points, often requiring robust algorithms to handle dynamic changes. Motion planning must address the additional complexity of controlling the robot's movement in real-time, considering kinematics, dynamics, and collision avoidance to ensure smooth and feasible trajectories. Your system must integrate both to handle unpredictable environments while maintaining accuracy and efficiency.
Future Trends in Autonomous Navigation
Future trends in autonomous navigation emphasize the integration of advanced AI algorithms and machine learning to enhance both path planning and motion planning capabilities. Emerging technologies like real-time sensor fusion and predictive analytics improve environmental understanding, enabling dynamic adjustment of routes and trajectories for safer, more efficient navigation. The convergence of 5G connectivity and edge computing facilitates faster decision-making processes, crucial for autonomous vehicles operating in complex, urban scenarios.
Path Planning vs Motion Planning Infographic