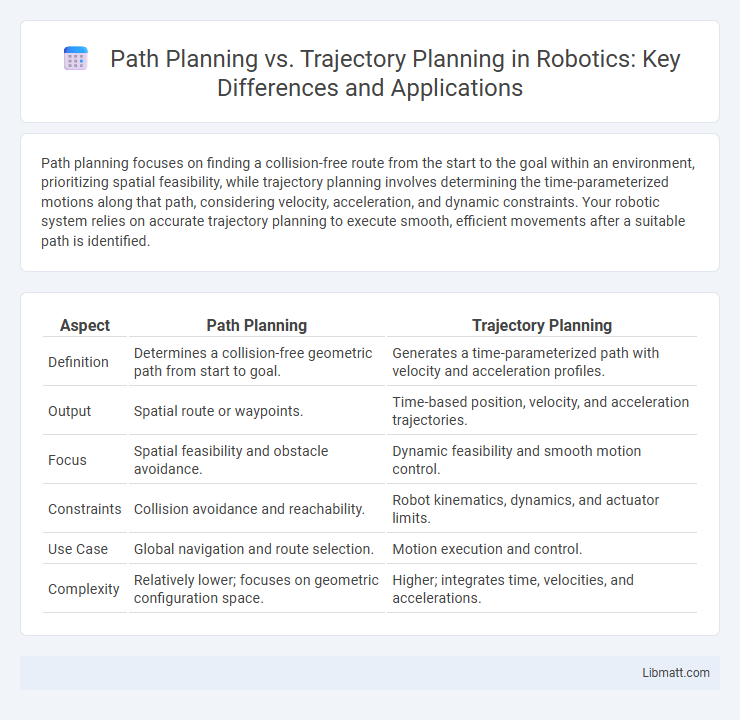
Path planning focuses on finding a collision-free route from the start to the goal within an environment, prioritizing spatial feasibility, while trajectory planning involves determining the time-parameterized motions along that path, considering velocity, acceleration, and dynamic constraints. Your robotic system relies on accurate trajectory planning to execute smooth, efficient movements after a suitable path is identified.
Table of Comparison
| Aspect | Path Planning | Trajectory Planning |
|---|---|---|
| Definition | Determines a collision-free geometric path from start to goal. | Generates a time-parameterized path with velocity and acceleration profiles. |
| Output | Spatial route or waypoints. | Time-based position, velocity, and acceleration trajectories. |
| Focus | Spatial feasibility and obstacle avoidance. | Dynamic feasibility and smooth motion control. |
| Constraints | Collision avoidance and reachability. | Robot kinematics, dynamics, and actuator limits. |
| Use Case | Global navigation and route selection. | Motion execution and control. |
| Complexity | Relatively lower; focuses on geometric configuration space. | Higher; integrates time, velocities, and accelerations. |
Introduction to Path Planning and Trajectory Planning
Path planning determines the optimal route for a robot or vehicle to move from its starting point to a destination while avoiding obstacles. Trajectory planning focuses on defining the precise motion parameters, such as velocity and acceleration, over time along the chosen path. Your autonomous system's efficiency and safety depend on integrating both path and trajectory planning to ensure smooth, collision-free navigation.
Defining Path Planning: Scope and Objectives
Path planning focuses on finding an optimal route or sequence of waypoints from a starting position to a target location within an environment, ensuring obstacle avoidance and efficient navigation. The primary scope encompasses spatial decision-making at a higher abstraction level, without specific timing or velocity profiles. Its objective is to determine a collision-free geometric path that serves as the foundation for subsequent motion execution.
Defining Trajectory Planning: Key Concepts
Trajectory planning involves determining a precise time-parameterized path for a robotic system or vehicle, specifying its position, velocity, and acceleration at each moment. It focuses on generating smooth, feasible motions that meet dynamic constraints and optimize performance metrics such as energy efficiency or safety. Your control system relies on trajectory planning to execute movements that align with both spatial paths and temporal requirements.
Core Differences Between Path and Trajectory Planning
Path planning determines the geometric route from a start to a goal position, focusing on obstacle avoidance and spatial feasibility in the environment. Trajectory planning involves assigning time-based velocity and acceleration profiles along the path to satisfy dynamic constraints and ensure smooth, feasible motion. You benefit from understanding these core differences when optimizing robotic or autonomous system performance for navigation and control.
Applications of Path Planning in Robotics and Automation
Path planning in robotics and automation plays a crucial role in enabling autonomous navigation, obstacle avoidance, and efficient route selection for mobile robots and robotic arms. It is extensively used in warehouse automation for optimizing item retrieval, in autonomous vehicles for safe and efficient travel, and in industrial robots to coordinate multi-step assembly processes. Effective path planning algorithms ensure minimal energy consumption and time, enhancing productivity and operational safety in automated systems.
Applications of Trajectory Planning Across Industries
Trajectory planning is essential in robotics, aerospace, and autonomous vehicles for defining precise motion paths that optimize speed, safety, and efficiency. In manufacturing, it enables robotic arms to execute complex assembly tasks with high accuracy, while in drones and space exploration, trajectory planning ensures efficient fuel usage and mission success. Medical robotics leverages trajectory planning for minimally invasive surgeries, enhancing precision and patient outcomes.
Algorithms Used in Path Planning
Path planning primarily utilizes graph-based algorithms such as A*, Dijkstra's, and Rapidly-exploring Random Trees (RRT) to efficiently determine a collision-free route from a start to a goal point. These algorithms leverage spatial representation techniques like occupancy grids or probabilistic roadmaps (PRM) to map the environment and identify optimal paths. In contrast, trajectory planning focuses more on generating smooth, time-parameterized motions along the path using methods like spline interpolation or optimization-based approaches.
Algorithms Used in Trajectory Planning
Trajectory planning algorithms primarily include polynomial interpolation, spline-based methods, and optimization-based approaches such as model predictive control (MPC) and rapidly-exploring random trees (RRT*). These algorithms focus on generating smooth, feasible paths by considering velocity, acceleration, and jerk constraints to ensure the trajectory is dynamically executable. Your trajectory planner benefits from integrating sampling-based methods like RRT* for global exploration with optimization techniques for local refinement to achieve efficient and safe movement.
Challenges and Limitations in Path vs Trajectory Planning
Path planning faces challenges such as handling complex environments with dynamic obstacles and ensuring collision-free routes while maintaining computational efficiency. Trajectory planning struggles with real-time constraints, requiring precise timing and velocity profiles to ensure smooth and feasible robot motion. Both methods are limited by sensor inaccuracies, environmental uncertainties, and computational resource demands, impacting the reliability and adaptability of autonomous systems.
Future Trends in Path and Trajectory Planning
Emerging trends in path and trajectory planning prioritize integration of artificial intelligence and machine learning to enhance real-time decision-making and adaptability in complex, dynamic environments. Advances in predictive modeling and sensor fusion technologies enable more precise navigation by anticipating obstacles and optimizing routes for energy efficiency and safety. You can expect developments in multi-agent coordination and autonomous systems to further revolutionize path and trajectory planning, improving scalability and robustness in fields like autonomous vehicles and robotics.
Path planning vs Trajectory planning Infographic