Mapping creates a detailed representation of an environment using data from sensors, enabling robots or systems to understand spatial layouts. Localization determines Your precise position within that map to navigate effectively and perform tasks accurately.
Table of Comparison
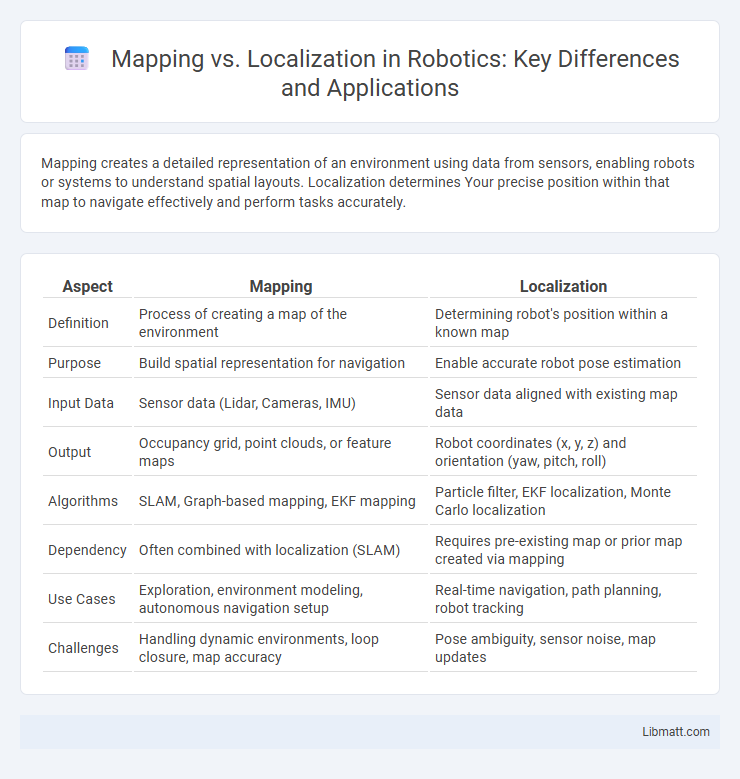
| Aspect | Mapping | Localization |
|---|---|---|
| Definition | Process of creating a map of the environment | Determining robot's position within a known map |
| Purpose | Build spatial representation for navigation | Enable accurate robot pose estimation |
| Input Data | Sensor data (Lidar, Cameras, IMU) | Sensor data aligned with existing map data |
| Output | Occupancy grid, point clouds, or feature maps | Robot coordinates (x, y, z) and orientation (yaw, pitch, roll) |
| Algorithms | SLAM, Graph-based mapping, EKF mapping | Particle filter, EKF localization, Monte Carlo localization |
| Dependency | Often combined with localization (SLAM) | Requires pre-existing map or prior map created via mapping |
| Use Cases | Exploration, environment modeling, autonomous navigation setup | Real-time navigation, path planning, robot tracking |
| Challenges | Handling dynamic environments, loop closure, map accuracy | Pose ambiguity, sensor noise, map updates |
Introduction to Mapping and Localization
Mapping involves creating a detailed representation of an environment, which is essential for autonomous systems to understand spatial layouts and navigate effectively. Localization determines the precise position and orientation of a robot or device within a pre-mapped environment, enabling accurate movement and task execution. Both processes rely heavily on sensor data integration, such as LiDAR, GPS, and visual inputs, to enhance accuracy and reliability in real-time applications.
Defining Mapping in Robotics
Mapping in robotics involves creating a detailed representation of an environment using sensor data, enabling robots to understand and interpret spatial information. This process generates maps that serve as foundational frameworks for navigation, obstacle avoidance, and task execution. Precise mapping enhances autonomous systems by improving their ability to plan routes and interact efficiently with dynamic surroundings.
Understanding Localization Concepts
Localization involves determining a robot's precise position within a known environment using sensor data and pre-existing maps. It relies heavily on algorithms such as Monte Carlo Localization and Kalman filters to reduce uncertainty and estimate the robot's pose. Accurate localization is essential for autonomous navigation, enabling effective path planning and obstacle avoidance.
Key Differences Between Mapping and Localization
Mapping creates a detailed representation of an environment by collecting spatial data, while localization determines your precise position within that pre-existing map. Mapping involves building and updating the model of the surroundings, often using sensors like LiDAR or cameras, whereas localization relies on matching current sensor data to the known map to estimate position. Understanding these key differences helps improve navigation accuracy and efficiency in robotics and autonomous systems.
Types of Mapping Techniques
Mapping techniques in robotics primarily include simultaneous localization and mapping (SLAM), occupancy grid mapping, and topological mapping. SLAM uses sensor data to create a map while simultaneously tracking the robot's location, ideal for dynamic environments. Occupancy grid mapping divides space into a grid of cells marked as occupied, free, or unknown, offering high-resolution spatial data for obstacle avoidance, whereas topological mapping focuses on the connectivity and relationships between nodes or landmarks for efficient path planning.
Popular Localization Methods
Popular localization methods include particle filters, extended Kalman filters (EKF), and simultaneous localization and mapping (SLAM) techniques. Particle filters use probabilistic sampling to estimate a robot's position in a map, while EKF applies recursive Bayesian estimation for real-time localization in dynamic environments. SLAM combines mapping and localization, allowing you to build a map of an unknown environment while simultaneously determining your location within it.
The Role of Sensors in Mapping and Localization
Sensors are crucial in both mapping and localization processes, providing real-time data to accurately detect environmental features. In mapping, sensors such as LiDAR, cameras, and ultrasonic detectors capture spatial information to create detailed and precise maps. For localization, these sensors continuously compare sensor data against the pre-built maps to determine the exact position and orientation of a device or robot within an environment.
Challenges in Mapping vs Localization
Mapping faces challenges such as creating accurate, large-scale environmental models with limited sensor data and handling dynamic changes in the environment. Localization struggles with maintaining precise position estimates in GPS-denied or visually ambiguous areas while minimizing computational load for real-time applications. Your system must balance these challenges to ensure robust autonomous navigation and environment awareness.
Applications in Autonomous Systems
Mapping enables autonomous systems to create detailed representations of their environments, essential for path planning and obstacle avoidance. Localization allows these systems to determine their precise position within the pre-built map, ensuring accurate navigation and real-time decision-making. Combined, mapping and localization support critical applications such as self-driving cars, robotic vacuum cleaners, and delivery drones, enhancing operational efficiency and safety.
Future Trends in Mapping and Localization
Emerging trends in mapping and localization emphasize the integration of AI-driven algorithms and real-time sensor fusion to achieve higher accuracy and environmental adaptability. Advances in simultaneous localization and mapping (SLAM) techniques are enabling autonomous systems to generate detailed, dynamic maps while localizing themselves in complex, GPS-denied environments. The increasing adoption of 5G connectivity and edge computing is accelerating data processing speeds, facilitating near-instantaneous updates and collaborative mapping across multiple platforms.
Mapping vs Localization Infographic