Robot calibration ensures precise alignment and accuracy of sensors and actuators by adjusting the robot's parameters to correct systematic errors, while robot mapping creates a spatial representation of the environment for navigation and task execution. Your choice between calibration and mapping depends on whether improving sensor reliability or enabling environmental awareness is the priority.
Table of Comparison
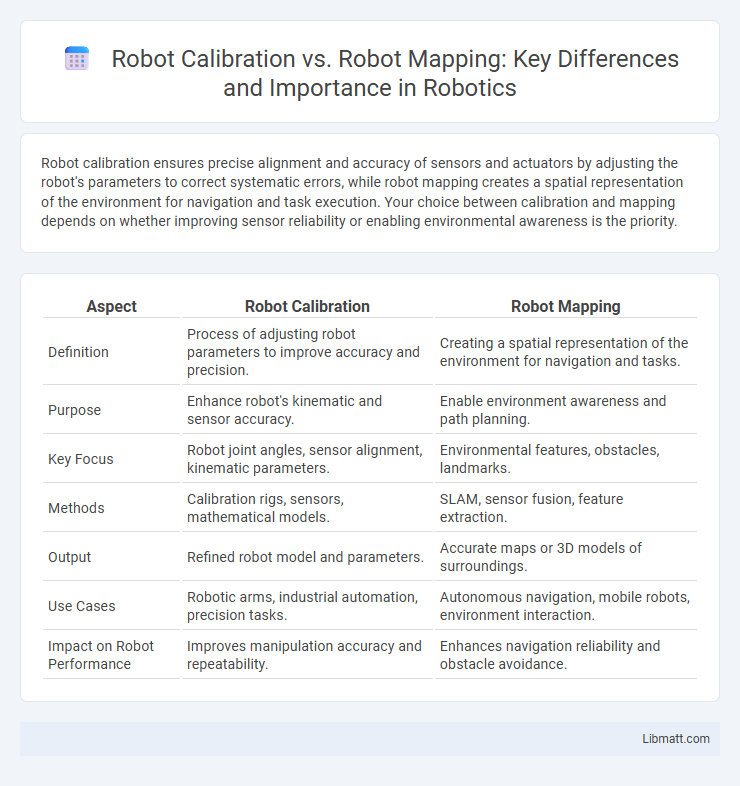
| Aspect | Robot Calibration | Robot Mapping |
|---|---|---|
| Definition | Process of adjusting robot parameters to improve accuracy and precision. | Creating a spatial representation of the environment for navigation and tasks. |
| Purpose | Enhance robot's kinematic and sensor accuracy. | Enable environment awareness and path planning. |
| Key Focus | Robot joint angles, sensor alignment, kinematic parameters. | Environmental features, obstacles, landmarks. |
| Methods | Calibration rigs, sensors, mathematical models. | SLAM, sensor fusion, feature extraction. |
| Output | Refined robot model and parameters. | Accurate maps or 3D models of surroundings. |
| Use Cases | Robotic arms, industrial automation, precision tasks. | Autonomous navigation, mobile robots, environment interaction. |
| Impact on Robot Performance | Improves manipulation accuracy and repeatability. | Enhances navigation reliability and obstacle avoidance. |
Introduction to Robot Calibration and Mapping
Robot calibration improves your robot's accuracy by adjusting its sensors and actuators to align with real-world measurements, ensuring precise movements and operations. Robot mapping creates a detailed digital representation of the robot's environment, enabling effective navigation and obstacle avoidance. Both processes are essential for optimizing robotics performance in dynamic and complex settings.
Defining Robot Calibration: Purpose and Processes
Robot calibration involves adjusting a robot's sensors and actuators to ensure accurate positioning and motion control, essential for tasks requiring precision. The process includes measuring discrepancies between expected and actual robot movements using calibration targets, followed by algorithmic corrections to align the robot's internal model with real-world coordinates. Understanding your robot's calibration enhances operational accuracy, reduces errors, and improves overall system reliability compared to robot mapping, which focuses on environment modeling rather than equipment tuning.
Understanding Robot Mapping: Concepts and Applications
Robot mapping involves creating a detailed representation of the environment using sensor data, essential for autonomous navigation and obstacle detection. Unlike robot calibration, which fine-tunes the robot's internal parameters for precise movement, mapping focuses on building spatial awareness to enable effective path planning and decision-making. Your robot relies on accurate mapping to interact confidently with its surroundings and perform tasks efficiently.
Key Differences Between Calibration and Mapping
Robot calibration involves adjusting the robot's internal parameters to ensure precise movement and accurate sensor readings, while robot mapping creates a spatial representation of the environment for navigation. Calibration focuses on optimizing the robot's mechanical and sensor functions, whereas mapping prioritizes understanding external surroundings for path planning. Your robot's performance depends on accurate calibration for reliability and detailed mapping for effective environment interaction.
Importance of Accurate Calibration in Robotics
Accurate robot calibration ensures precise alignment between the robot's physical components and its software model, significantly enhancing task execution and operational reliability. High-fidelity calibration minimizes positional errors, improving sensor data interpretation and enabling effective robot mapping for environment interaction. Without precise calibration, mapping algorithms yield inaccurate spatial representations, compromising navigation and automation efficiency.
Mapping Techniques for Autonomous Navigation
Robot calibration ensures accurate sensor alignment and mechanical precision, crucial for reliable data during autonomous navigation. Mapping techniques such as Simultaneous Localization and Mapping (SLAM) and occupancy grid mapping enable robots to build and update real-time spatial representations of their environment. Advanced methods like feature-based mapping and topological maps enhance path planning and obstacle avoidance, improving overall navigation efficiency.
Challenges Faced in Calibration vs. Mapping
Robot calibration faces challenges such as sensor inaccuracies, mechanical wear, and environmental variations that require precise adjustments to maintain operational accuracy. Robot mapping struggles with dynamic environments, sensor noise, and real-time data processing to create reliable spatial representations. Understanding these challenges helps you optimize robotic performance through tailored calibration and mapping strategies.
Integrating Calibration with Mapping for Precision
Integrating robot calibration with mapping enhances precision by ensuring that the robot's sensors and actuators are accurately aligned with the environment's spatial data. Calibration corrects mechanical and sensor errors, while mapping creates detailed representations of the surroundings, allowing for precise navigation and task execution. Your robot benefits from improved accuracy and efficiency through the seamless combination of these processes in real-time applications.
Technological Advances in Calibration and Mapping
Technological advances in robot calibration have enhanced sensor accuracy and alignment through automated algorithms and machine learning techniques, enabling precise adjustment of robotic systems for optimal performance. In robot mapping, innovations such as simultaneous localization and mapping (SLAM) combined with LiDAR and vision-based sensors have improved environmental perception and real-time navigation capabilities. Your robotic operations benefit significantly from these developments, ensuring higher efficiency and adaptability in dynamic settings.
Future Trends: Evolving Roles of Calibration and Mapping
Robot calibration and robot mapping are rapidly evolving with future trends emphasizing increased automation and integration of AI-driven algorithms. Calibration processes will become more adaptive, using real-time sensor feedback to enhance precision, while mapping technologies will advance through simultaneous localization and mapping (SLAM) improvements for dynamic environments. Your robotic systems will benefit from these developments by achieving higher accuracy and efficiency in navigation and task execution.
Robot Calibration vs Robot Mapping Infographic