Robot kinematics focuses on the motion of robots without considering forces, analyzing positions, velocities, and accelerations of robot parts. Robot dynamics examines the forces and torques that cause this motion, essential for controlling Your robot's movement accurately.
Table of Comparison
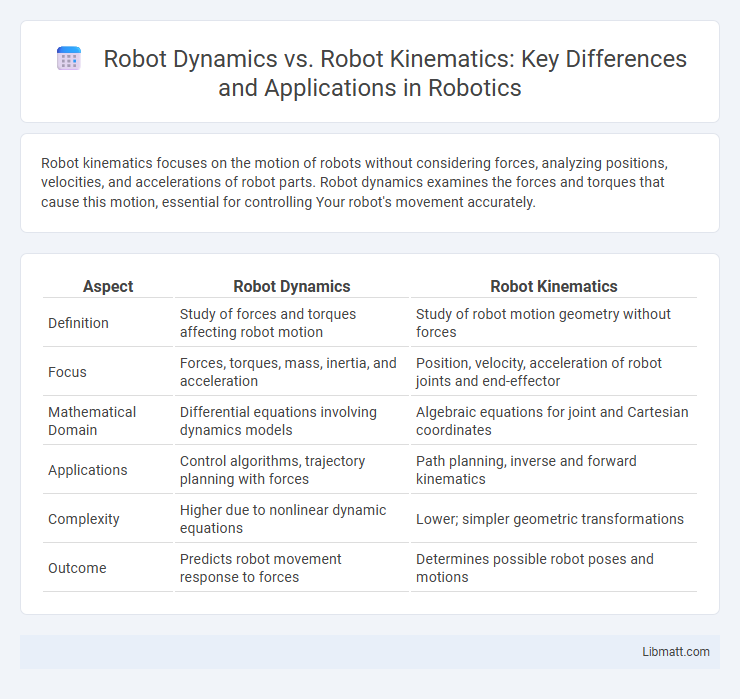
| Aspect | Robot Dynamics | Robot Kinematics |
|---|---|---|
| Definition | Study of forces and torques affecting robot motion | Study of robot motion geometry without forces |
| Focus | Forces, torques, mass, inertia, and acceleration | Position, velocity, acceleration of robot joints and end-effector |
| Mathematical Domain | Differential equations involving dynamics models | Algebraic equations for joint and Cartesian coordinates |
| Applications | Control algorithms, trajectory planning with forces | Path planning, inverse and forward kinematics |
| Complexity | Higher due to nonlinear dynamic equations | Lower; simpler geometric transformations |
| Outcome | Predicts robot movement response to forces | Determines possible robot poses and motions |
Introduction to Robot Kinematics and Dynamics
Robot kinematics deals with the geometry of motion, focusing on the position, velocity, and acceleration of robot parts without considering the forces causing the movement. Robot dynamics, on the other hand, studies the forces and torques that generate motion, incorporating concepts such as mass, inertia, and external loads to predict how a robot will respond under various conditions. Your understanding of both kinematics and dynamics is essential for precise control and simulation of robotic systems in practical applications.
Defining Robot Kinematics: Basics and Concepts
Robot kinematics involves the study of motion without considering the forces that cause it, focusing on parameters like position, velocity, and acceleration of robot components. Unlike robot dynamics, which includes the effects of forces and torques, kinematics is essential for understanding the geometry of robot movement and trajectory planning. Your grasp of kinematics enables precise control of robot arms and manipulators through forward and inverse kinematics calculations.
Understanding Robot Dynamics: Principles and Equations
Robot dynamics involves analyzing forces and torques that cause robot motion, governed by Newton-Euler and Lagrangian equations which model the relationship between input forces and resulting accelerations. Understanding robot dynamics allows you to predict how robots respond to control inputs and external disturbances, essential for precise movement and stability. This contrasts with robot kinematics, which only deals with motion geometry without considering forces or masses.
Key Differences Between Kinematics and Dynamics
Robot kinematics studies the motion of robot arms, focusing on positions, velocities, and accelerations without considering forces or torques. Robot dynamics analyzes the forces and torques that cause these movements, incorporating mass, inertia, and external forces for accurate control and simulation. Understanding these distinctions allows you to optimize robot performance by selecting the appropriate models for motion planning or force-based control.
Forward and Inverse Kinematics Explained
Forward kinematics involves calculating the position and orientation of a robot's end-effector based on given joint parameters, enabling precise control of its movements. Inverse kinematics, on the other hand, determines the necessary joint angles to reach a desired end-effector position, often requiring complex mathematical solutions due to multiple possible configurations. Understanding the distinction between these processes is crucial for optimizing your robot's motion planning and control systems.
Dynamic Modeling in Robotics: Importance and Applications
Dynamic modeling in robotics is crucial for accurately predicting and controlling robot motion by accounting for forces, torques, and inertial effects. This modeling enables enhanced precision in complex tasks such as manipulation, trajectory planning, and interaction with dynamic environments. Applications include robotic arms in manufacturing, autonomous vehicles, and humanoid robots, where real-time force feedback and adaptive control ensure optimal performance and safety.
Real-World Applications of Kinematics and Dynamics
Robot kinematics plays a crucial role in real-world applications such as path planning, motion simulation, and trajectory optimization, enabling robots to predict and control their movements without considering forces. Robot dynamics is essential in tasks requiring force and torque analysis, including robotic arm manipulation, load handling, and stability control, ensuring accurate interaction with the environment. Together, kinematics and dynamics optimize performance in industrial automation, medical robotics, and autonomous vehicles by balancing precise motion control with physical force management.
Computational Methods for Kinematics and Dynamics
Computational methods for robot kinematics typically involve matrix transformations and geometric algorithms to determine joint angles and end-effector positions, using techniques like Denavit-Hartenberg parameters and inverse kinematics solvers. In contrast, robot dynamics computation relies heavily on Newton-Euler and Lagrangian formulations to calculate forces and torques based on the robot's mass distribution and motion trajectories. Efficient algorithms such as recursive Newton-Euler and articulated-body methods optimize dynamic simulations and control in real-time robotic applications.
Challenges in Integrating Kinematics with Dynamics
Integrating robot kinematics with dynamics presents challenges such as accurately modeling inertia, friction, and external forces while maintaining real-time computational efficiency. Precise synchronization between the robot's geometric configurations and dynamic responses is critical for stability and control accuracy during complex motions. Ensuring robustness to parameter uncertainties and nonlinearities adds further complexity to the seamless fusion of kinematic and dynamic models.
Future Trends in Robot Kinematics and Dynamics
Future trends in robot kinematics and dynamics emphasize the integration of AI-driven adaptive control systems, enabling robots to perform complex tasks with higher precision and flexibility. Advances in real-time sensor fusion and machine learning algorithms enhance dynamic modeling, allowing robots to predict and respond to environmental changes more effectively. The development of soft robotics and bio-inspired mechanisms further pushes the boundaries of traditional kinematic and dynamic models, promoting safer and more efficient human-robot interactions.
Robot Dynamics vs Robot Kinematics Infographic