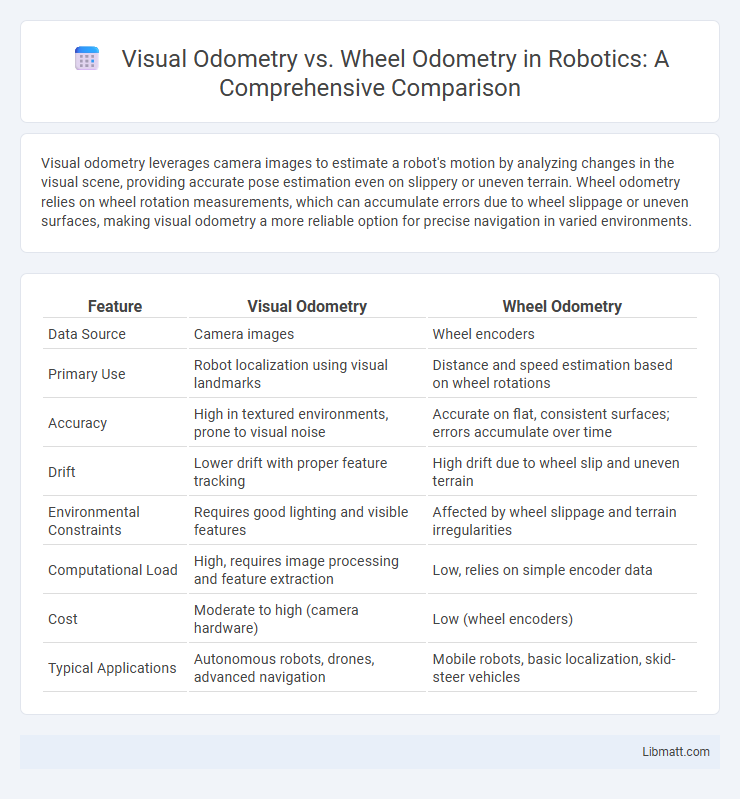
Visual odometry leverages camera images to estimate a robot's motion by analyzing changes in the visual scene, providing accurate pose estimation even on slippery or uneven terrain. Wheel odometry relies on wheel rotation measurements, which can accumulate errors due to wheel slippage or uneven surfaces, making visual odometry a more reliable option for precise navigation in varied environments.
Table of Comparison
| Feature | Visual Odometry | Wheel Odometry |
|---|---|---|
| Data Source | Camera images | Wheel encoders |
| Primary Use | Robot localization using visual landmarks | Distance and speed estimation based on wheel rotations |
| Accuracy | High in textured environments, prone to visual noise | Accurate on flat, consistent surfaces; errors accumulate over time |
| Drift | Lower drift with proper feature tracking | High drift due to wheel slip and uneven terrain |
| Environmental Constraints | Requires good lighting and visible features | Affected by wheel slippage and terrain irregularities |
| Computational Load | High, requires image processing and feature extraction | Low, relies on simple encoder data |
| Cost | Moderate to high (camera hardware) | Low (wheel encoders) |
| Typical Applications | Autonomous robots, drones, advanced navigation | Mobile robots, basic localization, skid-steer vehicles |
Introduction to Odometry in Robotics
Odometry in robotics measures a robot's position and motion over time using sensor data. Visual odometry estimates movement by analyzing sequential camera images to track environmental changes, offering high accuracy in complex terrains. Wheel odometry relies on wheel rotation data to calculate displacement but can accumulate errors due to wheel slip or uneven surfaces, making visual odometry more reliable for your precise navigation needs.
What is Visual Odometry?
Visual odometry is a technique that estimates a vehicle's position and motion by analyzing visual data captured from cameras, typically using features like edges, corners, or textures in consecutive images. Unlike wheel odometry, which relies on measuring wheel rotations and can suffer from slip or terrain irregularities, visual odometry provides more accurate and robust localization in diverse environments by leveraging visual cues. Your robotic system can benefit from visual odometry to achieve precise navigation and mapping, especially in conditions where wheel odometry is less reliable.
What is Wheel Odometry?
Wheel odometry estimates a vehicle's position by measuring the rotation of its wheels using encoders or tachometers, providing continuous data on distance traveled and speed. It is widely used in robotics and autonomous vehicles due to its simplicity and low cost but suffers from cumulative errors caused by wheel slippage and uneven terrain. Unlike visual odometry, which relies on camera data and environmental features to track motion, wheel odometry offers direct mechanical feedback but requires periodic calibration to maintain accuracy.
Core Principles of Visual Odometry
Visual odometry estimates motion by analyzing sequential camera images to track feature points and calculate changes in position and orientation. Unlike wheel odometry, which relies on encoder data from vehicle wheels susceptible to slip and drift, visual odometry uses computer vision algorithms to provide more accurate and drift-resistant pose estimation. Your robotic navigation system benefits from visual odometry's ability to adapt to diverse environments by extracting 3D structure and motion information directly from visual data.
Core Mechanisms Behind Wheel Odometry
Wheel odometry estimates a vehicle's position by measuring the rotation of its wheels using encoders, translating angular displacement into linear motion. This method relies on wheel circumference and encoder counts to calculate distance traveled, making it sensitive to wheel slip and surface irregularities. Unlike visual odometry, which uses camera images to track movement, wheel odometry provides continuous data but suffers from cumulative error due to slippage and uneven terrain.
Accuracy Comparison: Visual vs Wheel Odometry
Visual odometry offers higher accuracy in estimating motion by analyzing image sequences to capture detailed environmental changes, while wheel odometry relies on wheel rotation data prone to errors from slippage or uneven terrain. The accumulation of errors over time, known as drift, is typically lower in visual odometry due to its reliance on visual landmarks, whereas wheel odometry's accuracy degrades faster in challenging conditions. Your choice depends on the operational environment, but visual odometry generally provides more precise positioning for autonomous navigation.
Advantages and Limitations of Visual Odometry
Visual odometry offers precise motion estimation by analyzing sequential camera images, enabling robust navigation in GPS-denied environments and providing rich data for mapping and localization. Its advantages include the ability to detect and adapt to changes in terrain and environment without reliance on hardware subjected to mechanical wear, unlike wheel odometry, which can accumulate errors due to wheel slippage and uneven surfaces. Limitations of visual odometry arise from poor lighting conditions, lack of distinct visual features, and high computational demands, which can impact real-time performance and accuracy.
Pros and Cons of Wheel Odometry
Wheel odometry offers the advantage of simplicity and cost-effectiveness by relying on wheel encoder data to estimate movement, making it less computationally intensive than visual odometry. However, it suffers from cumulative error due to wheel slippage, uneven terrain, and surface conditions, which can lead to inaccurate position estimates over time. Your choice should consider these limitations, especially in environments where precise localization is critical or where wheel slip is frequent.
Applications and Use Cases
Visual odometry excels in applications requiring precise navigation in GPS-denied environments such as autonomous drones, robotics, and augmented reality devices, where camera-based motion estimation provides accurate position tracking. Wheel odometry is widely used in ground vehicles like autonomous cars and industrial robots for basic distance measurement and localization, especially in structured environments with predictable terrain. Your choice depends on the operational context: visual odometry offers robustness in dynamic, complex scenes, while wheel odometry remains effective for straightforward, short-range movement tracking.
Future Trends in Odometry Technologies
Visual odometry is advancing with integration of machine learning algorithms and deep neural networks to enhance accuracy in complex environments, while wheel odometry benefits from improvements in sensor fusion techniques and real-time error correction. Emerging trends include the development of hybrid systems that combine visual and wheel odometry data to leverage the strengths of both, improving robustness in dynamic and GPS-denied settings. Future odometry technologies emphasize higher precision, low-latency processing, and adaptability to diverse robotic applications such as autonomous vehicles and augmented reality.
Visual odometry vs Wheel odometry Infographic